Techline Q Roboter Plattform Zucchetti L95 ab 2021
Im Anhang zu diesem Beitrag können Sie sich Ersatzteil Listen für die Mähroboter Modelle:
- Mähroboter Next Tech Q (bis 2023)
- Mähroboter Next Tech QUARDITECH (ab 2024)
herunterladen.
Liste ersetzter Teile Historie - QUAD
TECHline Roboter Next Tech Q Rev. 1.6 - Tech LQ Cross
TECHline Roboter Next Tech QUADRITECH Rev. 1.1 - Tech Line QUADRITECH.
Im Anhang zu diesem Beitrag finden Sie zum Download die Bedienungsanleitung bzw. das Benutzer Handbuch für die Tech Line Mähroboter Modelle:
- Next TECH Q Modell B095EL0
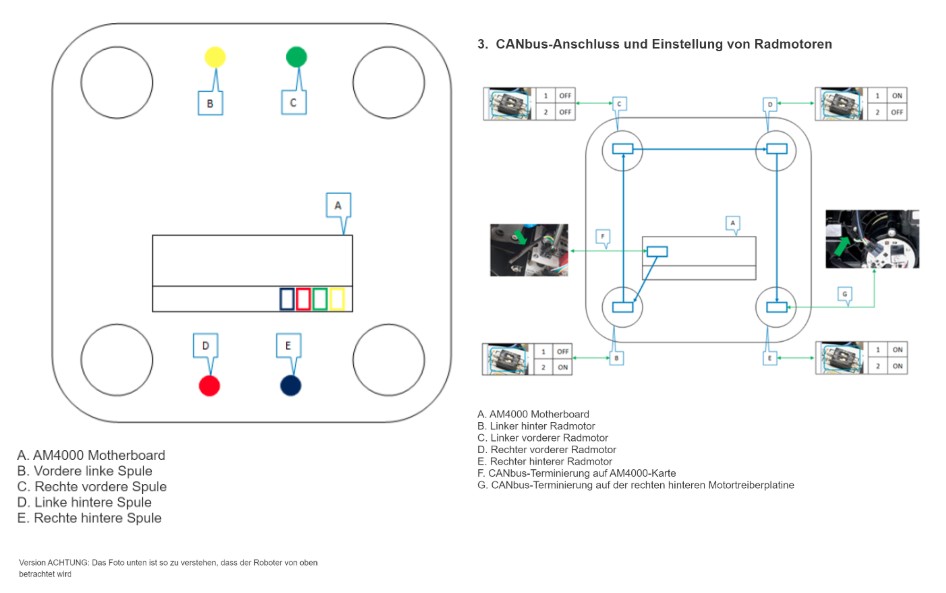
Die nachfolgenden Bilder zeigen die Belegung der verschiedenen Anschlüsse am AM4000 Mainboard des Next TECH Q sowie die CAN Bus Verkabelung der Antriebsmotoren und der Hindernis Radarsensoren.
Anschlüsse AM4000 Mainboard

Q Anschlüsse der Drahtsensoren
Wenn das System der Radar Hindernissensoren beim Next Tech Q einen Fehler Radar oder Fehler 171 anzeigt, sind nachfolgende Schritte zur Diagnose und Lösung zu empfehlen.
Dieses Verfahren kann auch angewendet werden wenn im Einsatz eine schlechte Erkennung von Hindernissen durch das Radar System festzustellen ist.
Mögliche Ursachen und Lösung für Radar Fehler + schlechtes Verhalten:
- Radar Sensoren sind schlecht kalibriert.
- Kalibrierung mit Service App oder PC Client.
- Anleitung zur richtigen Kalibrierung beachten.
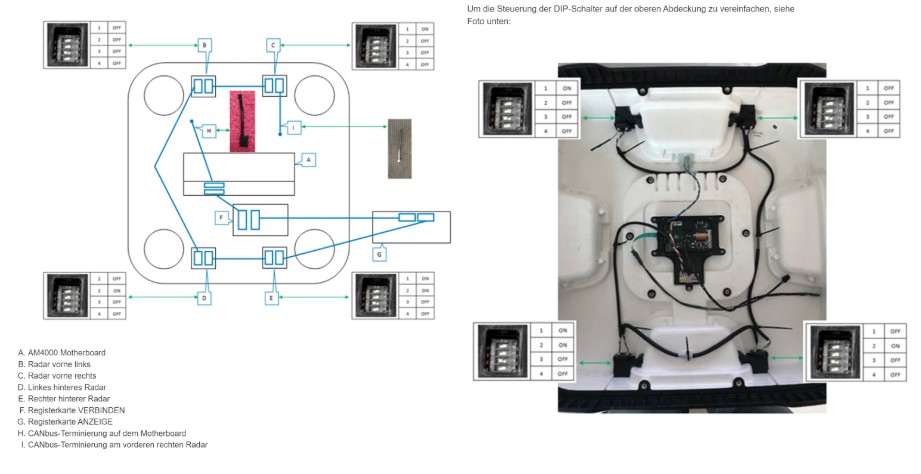
- Falsche Einstellung der DIP Schalter der Radar Sensoren im CAN Bus Verlauf.
- Einstellung der DIP Schalter prüfen.
- Darstellung der Anschlüsse und Einstellungen.
- Software der Radar Sensoren nicht auf dem aktuellen Stand.
- Software Update durchführen.
- Nach dem Update nochmals eine Kalibrierung durchführen.
- Schlechter Kontakt / Schlechte Verbindung der Radar Sensoren im CAN Bus Verlauf.
- LED der Radar Sensor Platine leuchtet dauerhaft = Mainboard kann nicht richtig mit der Sensor Platine kommunizieren. Platine ist eventuell nicht richtig zusammengesteckt (innere Pins)
- LED der Radar Sensor Platine ist komplett aus
- = Mainboard hat keinen Kontakt mit der Sensor Platine. Ursache vermutlich in der Verkabelung des CAN Bus. ODER
- = Radar Sensor Platine ist defekt und muss ausgetauscht werden.
Video bei den Anleitungsvideos.
Roboter verliert Ausrichtung eines Antriebsrades während dem Betrieb Diagnostik Update 2023
Wenn ein Next Tech Q Mähroboter die Ausrichtung eines Antriebsrades während dem Betrieb verliert, sollte zur Diagnostik und Lösung wie folgt verfahren werden.
Update 2023:
Für Geräte die nach Juli 2022 gekauft wurden, ist die unten beschriebene Ursache des Zahnrades weniger wahrscheinlich, da die Zahnräder aus neuem Material sind.
Die wahrscheinlichste Ursache wenn die Ausrichtung beim Start des Roboters funktioniert, er diese aber während dem Betrieb verliert = Verschleiß im Zahnrad des Lenkungssystems:

Nach Analyse des Herstellers passiert das Problem überwiegend am rechten Vorderrad und linken Hinterrad (aufgrund der Struktur des Roboters) und sollte durch einige niedrige Hindernisse verursacht werden, die direkt auf die Radstrebe treffen.
Video bei den Anleitungsvideos.
Löst Problem Roboter verliert Ausrichtung Antriebsrad ab 2023
Um das Problem des Next Tech Q zu verbessern, wenn während des normalen Betriebs einer der Lenkmotoren seine Ausrichtung verliert, haben wir den Magnethalter mit 2 Magneten anstelle von 1 Magnet modifiziert.
Im folgenden Dokument wird gezeigt, wie der Magnethalter im Lenkmotor des L95-Roboters ausgetauscht wird.
Benötigte Ersatzteile und Werkzeuge
Je Rad 1 x 075Z55100A Magnethalter und 1 x 075Z47900A Halter Treiberplatine
WICHTIG:
Sollten Sie keine neuen Halterungen für die Treiberplatinen verfügbar haben, können auch die bisherigen Halter weiter verwendet werden. Um optimalen Betrieb zu gewährleisten, sollte die mittlere Öffnung der Halter auf 42 mm aufgebohrt werden. Dies soll vermeiden, dass die neuen Magnete beim Drehen an der Halterung schleifen.
Video bei den Anleitungsvideos.

Schraubendreher TX 10, TX 25, TX 20 sowie Loctite blau.
ACHTUNG: Diese Anleitung richtet sich nur an Service Techniker oder Personen welche Zugang zur Service App haben und in deren Nutzung eingewiesen wurden.
In diesem Beitrag zeigen wir Ihnen, wie Sie die Radar Hindernis Sensoren des Next TECH Q zur Optimierung richtig kalibrieren. Zur Kalibrierung benötigen Sie ein Smartphone mit der Service App und einen Service App Zugang.
Eine schriftliche Anleitung für die Kalibrierung unter Android. Bitte stellen Sie sicher, dass die Service App auf Ihrem Android Smartphone die aktuellste Version hat. Veraltete Versionen können beim Versuch die Radar Kalibrierung aufzurufen die App ungewollt schließen.
Schritt für Schritt
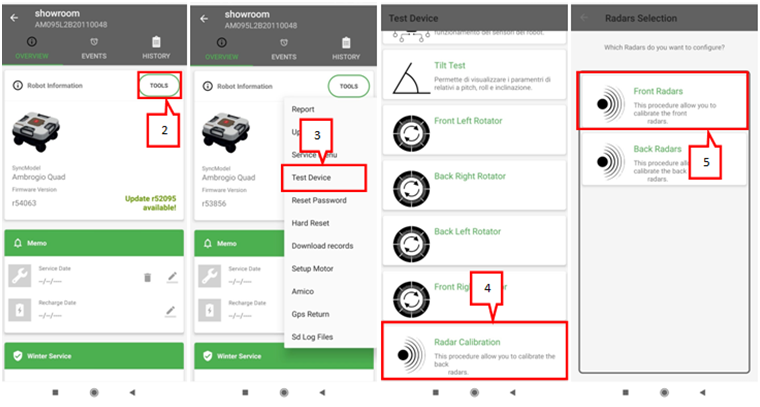
1- Öffnen Sie die Service-App und koppeln Sie mit dem Roboter
2- Klicken Sie auf die Schaltfläche Werkzeug
3- Klicken Sie auf die Schaltfläche Test
4- Klicken
Sie auf die Schaltfläche Radarkalibrierung 5- Wählen Sie das FRONT RADAR in der App
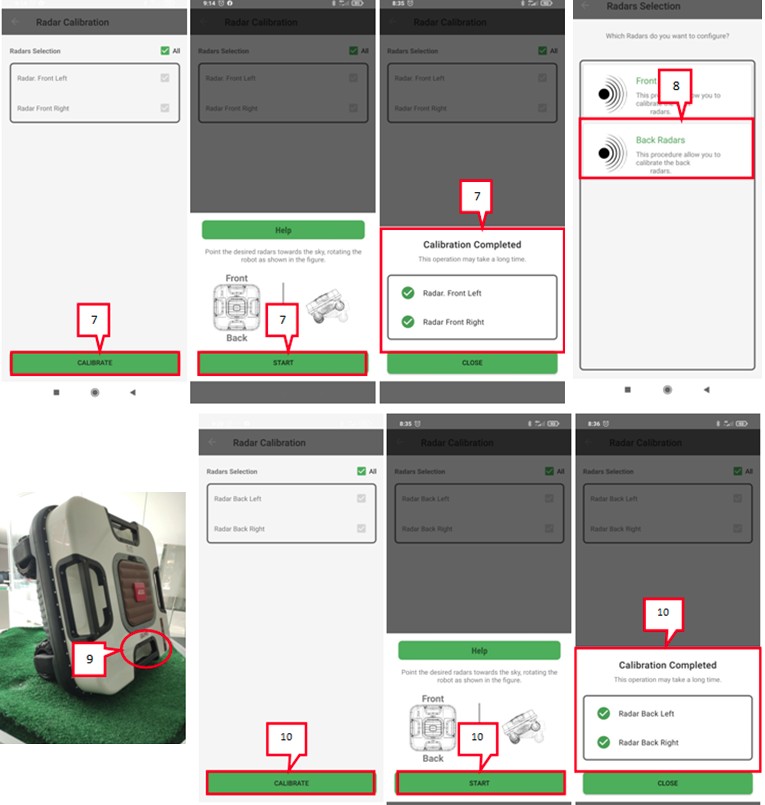
6- Bringen Sie den Roboter mit dem FRONT RADAR direkt in die vertikale Position Position in den Himmel
ACHTUNG: Betrachten Sie die Seite des Regensensors wie die FRONT des Roboters
ACHTUNG: Bleiben Sie nicht zu nahe am Roboter und stellen Sie sicher, dass sich keine Objekte in der Nähe des Radars befinden, die Sie kalibrieren möchten
7- Klicken Sie auf die Schaltfläche Kalibrieren , klicken Sie auf die Schaltfläche Start und warten Sie, bis der Kalibrierungsvorgang abgeschlossen ist
8- Wählen Sie das BACK RADAR in der App
9-Bringen Sie den Roboter in eine vertikale Position mit dem RÜCKENRADAR direkt zum Himmel ACHTUNG: Betrachten Sie die gegenüberliegende Seite des Regensensors wie die RÜCKSEITE des Roboters ACHTUNG: Bleiben Sie nicht zu nahe am Roboter und stellen Sie sicher, dass keine alle Objekte in der Nähe des Radars, die Sie kalibrieren möchten
10- Klicken Sie auf die Schaltfläche Kalibrieren , klicken Sie auf die Schaltfläche Start und warten Sie, bis der Kalibrierungsvorgang abgeschlossen ist.
Im Jahr 2020 kam mit dem Next TECH Q der erste Mähroboter aus dem Hause Zucchetti mit einem Radar Hindernis Sensor auf den Markt.
Diese Art Sensor funktioniert indem vorne und hinten im Gerät jeweils zwei Radar Sensoren verbaut sind, die ein Radarsignal in einem Kegel jeweils in Fahrtrichtung des Roboters abstrahlen. Vergleichbar in etwa mit einem Scheinwerfer beim Auto. Damit kann das Radar alle Hindernisse erkennen, auf die der Roboter zufährt und die somit das Radarsignal reflektieren.
Gleichermaßen kann der Sensor keine Hindernisse erkennen welche das Signal nicht reflektieren. Dazu gehören z.B. zu niedrige Hindernisse (> 10 cm), sehr spitz zulaufende Hindernisse oder solche mit einer zu kleinen Oberfläche wie sehr schmale Hindernisse. Ebenfalls schwierig erkannt werden Hindernisse die plötzlich im Radarbereich auftauchen, beispielsweise weil im Rahmen eines Tests das Hindernis von oben in die Fahrtrichtung des Roboters gestellt wird.
Zur Erkennung dieser Hindernisse hat der Roboter einen weiteren Sensor für Hindernisse, welcher den Widerstand auf den Antriebsrädern misst und bei plötzlich erhöhtem Widerstand ein Hindernis erkennt. Dazu werden die Hindernisse allerdings mit Berührung angefahren. Konstruktionsbedingt löst dieser sogenannte Smart Bump beim Next Tech Q "gröber" aus als bei anderen Tech Robotern, da er sonst ggf. bei Traktion an starken Steigungen auslösen würde und der Roboter diese nicht mehr bewältigen könnte.
Obwohl relativ wenige Hindernisse die im normalen Betrieb in normalen Gärten auftauchen so beschaffen sind, dass sie ein Radar Signal nicht reflektieren, kann es vorkommen. 

In diesem Fall ist es zu empfehlen das Hindernis mit einer Drahtinsel auszugrenzen.
Sollten Sie im Betrieb feststellen, dass der Radar Hindernisse nicht erkennt, obwohl diese nach der obigen Beschreibung erkannt werden sollten, können Sie die Funktion der Radar Hindernis Sensoren wie folgt optimieren.
1. Stellen Sie sicher das die Roboter Software mindestens Version 55948 oder höher ist. Mit dieser Software wurden die ersten Erfahrungswerte mit dem Radar Sensor aus dem Markt im Roboter umgesetzt. Führen Sie ggf. ein Software Update über die TECH Remote App durch.
2. Lassen Sie die Radarsensoren von einem Service Partner mit der Service App Kalibrieren. Die Kalibrierung kann helfen Veränderungen durch den Einsatz des Mähroboters Rechnung zu tragen und die Reaktion des Radars auf den aktuellsten Stand zu bringen.
Service Partner finden eine gesonderte Anleitung für die Kalibrierung hier im Next TECH Q Bereich nachdem Sie sich eingeloggt haben.
ANLEITUNGSVIDEOS
Next Tech Q Service App Radar Sensoren kalibrieren
Video Zahnräder des Antriebs geprüft/getauscht wird
Im Video wird gezeigt wie die Zahnräder des Antriebs geprüft und ggf. getauscht werden können.
Techline Q Tausch der Magnet
Das Vorgehen zum Tausch der Magnete und des Magnethalters wird in diesem Video gezeigt.
Video Fehler LED leuchtet dauerhaft
Die Wendehilfe erlaubt das Drehen auf der Stelle des ILD01
ILD 01 Video Anleitung Serviceposition
ILD01 Video Anleitung Austausch des Antriebsriemens
Anmerkung: Die Reparaturzeit dient nur als Referenz und umfasst nur die im Video gezeigten Vorgänge.
ILD01 Video Anleitung Austausch der elektromagnetischen Kupplung
Anmerkung: Die Reparaturzeit dient nur als Referenz und umfasst nur die im Video gezeigten Vorgänge.