Händler Informationen Dokumente Vorlagen und allgemeine Anleitungen
Flottenmanagement
Eine weitere, sehr nützliche Funktion, des ZCS Robot Park ist es eine Statistik über die jüngere Einsatzzeit des Roboters anzeigen zu lassen. Die Statistik wird über den etwas unscheinbaren, daher nachfolgend markierten Button unten rechts aufgerufen:

Wird die Statistik aufgerufen, kann zunächst wie bei der Erstellung eines Roboter Berichts ein Zeitraum ausgewählt werden für den der Bericht abgerufen werden soll. Da der Bericht jedoch auf den Informationen in der Cloud basiert, geht die Erstellung ungleich schneller:

Ist der Zeitraum gewählt und mit "zeige" aufgerufen. Erscheint zunächst eine summierte Statistik.

Bereits hier lassen sich erste Rückschlüsse darauf ziehen, ob der Roboter Bereiche hat in denen es größere Probleme gibt, da für den gesamten Bereich Fehler aufgelistet werden die über den gewählten Zeitraum aufgetreten sind. Im Beispiel würde beispielsweise sofort der Rückschluss naheliegen, dass auf zu niedriger Schnitthöhe in Relation zum stehenden Gras gearbeitet wird.
Noch interessanter wird es, wenn wir diese Ansicht mit dem Tap oben rechts auf "Tabelle" umschalten. Dann erscheint diese Ansicht:

Nun sehen wir, vergleichbar mit dem Roboter Bericht einzelne Statusmeldungen des Roboters mit Zeit Stempel und Dauer. Obgleich es nicht möglich ist Details wie im Bericht einzusehen (beispielsweise Motordaten) gewinnen wir doch ein gutes Bild vom Einsatz des Roboters. Wir sehen wann er startet, zu einer bestimmten Zone fährt oder den Rand mäht und wie die "Arbeit" in der Fläche läuft. Im Bild sehen wir unten, dass der Mäher einen Einsatz mit Randmähen gestartet hat, dabei jedoch häufig Messer blockiert hat. Die Zeit von 12 Stunden legt nahe, dass der Roboter auch mit diesem Fehler abgebrochen hat. Es heißt der Roboter stand 12 Stunden in diesem Status.
Da der nächste Status direkt "Laden" ist, können wir davon ausgehen, der Mäher wurde von Hand in die Station gestellt. Im Beispiel ging es damit weiter, dass mehrfach versucht wurde den Mäher zu starten, mit gleichem Resultat, bis es dann nach etwa einer halben Stunde möglich war zu normalem Einsatz zurück zu kehren. Die Vermutung liegt nahe, dass die Problematik in diesem Fall dadurch behoben wurde, dass entweder die Schnitthöhe höher eingestellt oder ein eventuell stark verkrustetes Mähdeck gereinigt wurde.
Auf diese Weise können mit etwas Erfahrung häufig Problem Felder gut schon vorab zumindest grob eingeschätzt werden.
Ist ein Roboter in die ZCS Robot Park Überwachung aufgenommen, kann er in der Übersicht der linken Seite des Startbildschirms des Robot Park ausgewählt werden:

Über das 3-Punkte Menü bei jedem Roboter kann:
- Ein Roboter Umbenannt werden.
- Ein Roboter einer Untergruppe (z.B. Kunde mit mehreren Robotern) hinzugefügt werden. Neue Gruppen werden dabei automatisch erstellt.
- Der Roboter aus der Überwachung gelöscht werden. Wird ein Roboter aus der Überwachung gelöscht, wird die Lizenz wieder frei und ist für andere Roboter verwendbar.
Wird ein einzelner Roboter ausgewählt, wird sein letzter gemeldeter Standort auf der Kate in der Mitte angezeigt. Darunter befinden sich weitere Statusinformationen mit folgenden Merkmalen:
- Modell, Software Version, IMEI (des Connect Modul) und SN des Roboters. Neben offensichtlichen Gründen zur Weitergabe der Information ohne nachschlagen zu müssen, ist insbesondere die Info über die S.W. Version nützlich um zu prüfen ob z.B. ein Update vom Kunden selbst vorgenommen wurde seit man den letzten Report gezogen hat oder generell welche S.W. Version beim Roboter aktuell im Einsatz ist.
- Der zuletzt gemeldete Status des Roboters. Diese Anzeige ist insbesondere nützlich um zu sehen ob das Connect des Roboters den Status regulär aktualisiert. Daraus lässt sich schließen ob das Connect des Roboters ordnungsgemäß mit dem Cloud Dienst (auf den wir hier direkt zugreifen) kommuniziert. Durch Abgleich der Info mit der Anzeige in der Remote App wiederum kann geschlossen werden ob das Handy mit dem abgeglichen wird seinerseits korrekt mit der Cloud verbunden ist.
- Informationen darüber wann der aktuelle Connect Tarif ausläuft oder ob das Datenvolumen aufgebraucht ist.
- Befehle vergleichbar mit den Befehlen auf der Startseite der Tech Remote App. Um Kunden nicht zu verunsichern ist es dringend empfohlen diese Optionen nur in Rücksprache mit den Kunden z.B. bei Problemen mit dem Automatikprogramm zu verwenden.
- Mähen bis xxx
- Randmähen
- Laden bis xxx
Seht in einem weiteren Beitrag was mit dem ZCS Robot Park Statistik möglich ist und wie diese beitragen kann eine gewisse Fehlerdiagnose rein aus der Ferne zu unterstützen
Das Online Tool ZCS Robot Park ermöglicht Händlern, Importeuren und dem Hersteller Tech Line (bzw. Zucchetti Mähroboter) mit Connect Modul und aktivem Datentarif in einem Web basierten Tool zu überwachen. Aktuell sind die wichtigsten Funktionen:
- Übersicht zum Roboter Status (Software Version, Status, Connect Aktivität).
- Ring Statistik zu wählbarem Einsatzzeitraum.
- Ereignis Bericht (Übersicht ohne Event Details) für den gewählten Zeitraum. Speziell diese Funktion kann Händler bei Hilfe und Diagnose aus der Ferne stark unterstützen da Events in Reihe sichtbar sind, was hilfreich ist obwohl diese nicht so Detailliert wie im Bericht eingesehen werden können. Sehen Sie dazu weitere Beiträge.
Der Zugang zum ZCS Robot Park ist für alle Partner kostenfrei möglich, die über einen Service Account für Tech Line (oder Zucchetti) Mähroboter verfügen. Die Zugangsdaten entsprechen denen des Service Account. Benutzername und Passwort.
Der ZCS Robot Park kann unter folgender Adresse aufgerufen werden:
https://zcs-robot-park.web.app/#/
Sie gelangen zum Login Bildschirm:

Nach Eingabe Ihrer Service Account Login Daten gelangen Sie zum Start Bildschirm:

Links findet sich die Liste von Mährobotern, die Sie bereits in der Überwachung haben.
In der Mitte findet sich die Landkarte mit den Standorten der überwachten Roboter.
Oben Rechts einmal der Menüpunkt für Anfragen zur Online Überwachung sowie der Menüpunkt mit den Details zu Ihrem ZCS Robot Park Account.
Damit ein Roboter in die Online Überwachung aufgenommen werden kann, muss eine Freigabe bzw. Anfrage durch den Besitzer (Anwender) in der Tech Remote App gemacht werden. Das Vorgehen ist in diesem Beitrag gezeigt:
Freigabe Tech Line Mähroboter zur Online Überwachung
WICHTIG: Die Überwachung ist nur für Roboter mit einem Connect Modul und aktivem Datentarif möglich.
Damit ein Kunde die Freigabe für Sie als Händler bzw. Partner ermöglichen bzw. starten kann, muss er in der Tech Remote App entsprechend der obigen Anleitung Ihre zutreffende Partner Mailadresse exakt und korrekt eingeben. Diese Adresse finden Sie oben rechts unter Ihren Account Details:

Hat ein Kunde Sie für die Fernwartung eingeladen bzw. die Fernwartung bei Ihnen angefragt, erscheint diese Anfrage oben Rechts unter dem Menüpunkt für Anfragen (Glocke Symbol).

Hier können Sie offene Anfragen sowie eine Historie über abgelehnte und angenommene Anfragen einsehen sowie offene Anfragen annehmen (grüner Haken) oder ablehnen (rotes Kreuz).
WICHTIG: Damit Sie offene Anfragen annehmen können, benötigen Sie verfügbare und aktive Lizenzen:

Lizenzen können Sie zu den jeweils gültigen Preisen bei uns als Importeur erwerben. Es handelt sich um ein Abo-Modell, das sich automatisch verlängert.
Um Lizenzen zu erhalten, müssen Sie die gewünschte Anzahl mit dem Button unter den aktuell gültigen Lizenzen bei uns anfragen.

Es ist uns nicht möglich Lizenzen ohne Anfrage zur Verfügung zu stellen.
Aktuell ist das Modell für Lizenzen wie folgt:
- Lizenzen werden beim Importeur erworben und vom Importeur an den Händler zugewiesen.
- Sie haben eine Laufzeit von mindestens einem Jahr und verlängern sich automatisch um ein weiteres Jahr, falls keine rechtzeitige Kündigung des Abos vorliegt. Wir empfehlen Ihnen, es mit Ihren Kunden ähnlich zu machen oder die Lizenzgebühr z.B. im Winterservice mit einzurechnen. Der Vorteil für Sie und Ihre Kunden ist definitiv einen Preis wert!
- Für Roboter verwendete Lizenzen sind nicht dauerhaft an den Roboter gebunden. Wenn Sie einen Roboter aus der Überwachung löschen, wird die Lizenz wieder zu Ihren freien und aktiven Lizenzen hinzugefügt.
Wenn Sie eine Anfrage für eine Online Überwachung akzeptieren, wird der Roboter zunächst mit seiner IMEI angezeigt. Sie können jedoch auch einen beliebigen Namen vergeben. Ab sofort erscheint der Roboter in der Übersicht für Roboter zur Überwachung links.
Erfahren Sie in weiteren Beiträgen wie Sie die verschiedenen Funktionen der Überwachung nutzen.
Wichtig: Die Online Überwachung ist nur für Mähroboter mit Connect Modul und aktivem Datentarif möglich.
Die Online Überwachung von Tech Line Mährobotern im ZCS Robot Park ist ein hierarchisch aufgebautes System. Die mögliche Hierarchie von unten nach oben ist:
- Anwender (niedrigste Stufe. Zugänge werden aktuell nicht angeboten)
- Händler
- Importeur
- Hersteller (höchste Stufe)
Ein im System registrierter Roboter kann ab der Ebene von der er registriert wurde und allen darüber liegenden Ebenen gesehen werden.
Beispiel: Der Anwender gibt die Überwachung seines Roboters für den Händler frei. Dann können auch der Importeur und der Hersteller auf den Roboter zugreifen.
Damit die Online Überwachung eines Roboters möglich ist und gestartet werden kann, muss der Besitzer (meist Anwender) diese Überwachung freigeben. Die Freigabe erfolgt ganz einfach über die TECH Remote App.
Wählen Sie in der Remote App den Punkt "Information" und tragen Sie unter "E-Mailadresse des Fachhändlers" die Service Partner E-Mail Adresse des Händlers ein, dem Sie die Überwachung im RobotPark gestatten wollen.
WICHTIG: Damit die Überwachung gestartet werden kann, muss in die App exakt die richtige Mailadresse des Händlers (oder Partners) eingetragen werden. Inklusive möglicher Schreibweisen (Klein / Groß). Die Korrekte Adresse findet der Händler (oder Partner) im Startbildschirm des ZCS Robot Park. Sehen Sie dazu gehörige Anleitungen.
Statistik als Hilfe zur Ferndiagnose
In diesem Video erklärt Christian Rumsauer, wie das Tool ZCS Robot Park dabei helfen kann, Probleme mit Robotern aus der Ferne zu diagnostizieren und vielleicht sogar zu beheben.
Kernpunkte:
- Der Robot Park bietet eine detaillierte Statistik und Überwachung der Roboter-Aktivitäten, die dabei hilft, Fehlerursachen zu erkennen.
- Anhand eines konkreten Beispiels zeigt Christian, wie man im Robotpark-Tool die Aktivitäten des Roboters analysieren und Problembereiche identifizieren kann.
- Mit den Informationen aus dem Robot Park lassen sich oft schon vor einem Vor-Ort-Besuch mögliche Ursachen für Probleme eingrenzen.
- Das ermöglicht eine effizientere Fehlerbehebung und Unterstützung der Kunden durch den Händler.
- Christian empfiehlt den Händlern, möglichst viele Roboter in den Robot Park einzubinden, um von dieser Ferndiagnose-Funktion zu profitieren.
Mainboard
In diesem Beitrag erklären wir Ihnen alle verfügbaren Optionen im Service Menü von Robotern mit AM4000 Mainboard. Bei TECH Line sind dies Stand 2021:
TECH Line D1, DZ2, BZ3 und DZ3
Pro Tech D25, L25, S25, L35, B40 und D40
Next Tech DX2, LX2, SX2, BX4, LX4, LX6 und Q Modell.
Das Service Menü kann bei Geräten mit Touchscreen wie in der Anleitung beschrieben aufgerufen werden. Auch die nachfolgenden Anzeige Beispiele entsprechen der Touchscreen Anzeige.
Bei Geräten mit und ohne Touchscreen kann das Service Menü über die Ambrogio Service App für Smartphone und Tablet aufgerufen werden. In der App sind alle nachfolgend erklärten Punkte in einer Anzeige (Service Menü) enthalten.
1. Zugang zum Servicemenü
So kommen Sie in das Servicemenü:
1) Drücken Sie länger auf die "i"-Taste, bis ein neuer Bildschirm mit PIN- Abfrage angezeigt wird.
ACHTUNG: wenn Sie die i-Taste nur kurz drücken, kommen Sie in den Statistik- Bildschirm!

2) Geben Sie den PIN: 3816 ein
ACHTUNG: Der PIN-Code kann nicht geändert werden, und gilt für alle AM4000
Motherboards.


- Mit den seitlichen Pfeilen können Sie die Bildschirme wechseln
- Wenn Sie auf das Quadrat neben der Bezeichnung drücken, kommen Sie in das Untermenü. Jedes Untermenü wird nun folgend beschrieben:
3. Signaleinstellungen
In diesem Untermenü können Sie die Einstellungen des Signalempfängers einstellen. (Empfängerkanal, Airmarker-Einstellung, und die "no border" Option)

A - SIGNALMESSUNG: hier wird die Signalstärke angezeigt, die die Linke und rechte Spule am Roboter misst:
+ zeigt an, das sich die Spule innerhalb des Begrenzungskabels befindet.
- zeigt an, das sich die Spule ausserhalb des Begrenzungskabels befindet.
"--" zeigt an das der Roboter die Signalstärke nicht messen kann.
Jede Reihe zeigt ein Spulenpaar. Die Anzahl der Spulen kann von Modell zu Modell variieren.
der Wert stellt die Signalstärke dar und ist normalerweise keine nützliche Info zur Fehlerbehebung. Bei abnormalem Roboterverhalten kann diese Info für den Hersteller nützlich sein.
B - KANAL: Wählen Sie den Empfängerkanal, für den am Sender eingestellten Kanal. Für die "no border" Option wählen Sie OFF (diese Einstellung bleibt solange aktiv, bis der Roboter ausgeschaltet wird, oder wieder ein Kanal ausgewählt wird).
C - AIR MARKER EINSTELLUNG: Um den Airmaker Signalempfang ein und auszuschalten.
OFF: Roboter reagiert nicht auf das Airmakersignal. (Anmerkung: Der 4.0 fährt bei dieser Einstellung trotzdem rückwärts in die Ladestation)! ON: Standardeinstellung. Der Roboter reagiert auf das Airmakersignal.
HINWEIS: Wenn der Airmaker aktiviert ist, und der Roboter das Airmakersignal erkennt, dann ist die Textanzeige über der OFF und ON Taste makiert (grün)!
4. Erweiterte Einstellungen (other settings)
In diesem Untermenü können Sie die erweiterten Funktionen des Roboters einstellen. Es besteht aus mehreren Bildschirmen, die sich durch die seitlichen Pfeile anwählen lassen.

Die Einstellungen bleiben auch erhalten, wenn der Roboter ausgeschaltet wird.
Compass und Gyro: Deaktiviert oder aktiviert den Kompass oder das Gyroskop, damit der Roboter geradelinig fahren kann. Beide Sensoren, Kompass und Gyroskop sind im Motherboard integriert.
Sollte der Roboter beginnen, große Kreise zu fahren oder gekrümmte Bahnen zu ziehen, dann deaktivieren Sie Gyro und Kompass, um zu erkennen ob der Fehler an einen den beiden Sensoren liegt. Deaktivieren Sie beide Sensoren zB bei einer Vorführung oder einem manuellen Start wenn Sie vermeiden möchten, dass sich der Roboter immer wieder selbst geradlinig ausrichten soll.
Lift: Deaktiviert oder aktiviert die Hebesensoren (das sind die sogenannten vorderen Drop-Down-Räder). ACHTUNG: das ist eine Sicherheitsfunktion!
Stop: Deaktiviert oder aktiviert die Stopp-Taste auf der Roboterhaube. ACHTUNG: das ist eine Sicherheitsfunktion!
Bump: Deaktiviert oder aktiviert die Bumpsensoren (Stoß, oder Hinderniss-sensoren). ACHTUNG: das ist eine Sicherheitsfunktion!
Blade Height: nur verfügbar bei Robotermodellen mit elektrischer Schnitthöhenverstellung. Aktivieren oder Deaktivieren der elektrischen Schnitthöhenverstellung.
Slow Border: Bei Aktivierung: Der Roboter verlangsamt seine Fahrgeschwindigkeit, wenn er in die Nähe des Begrenzungskabels kommt. Deaktiviert: Roboter nähert sich dem Begrenzungskabel mit seiner normalen Geschwindigkeit.
Corridor: Deaktiviert oder aktiviert die Erkennung einer schmalen Durchfahrt, während des Mähvorgangs. (Der Roboter fährt dann an einem Begrenzungskabel aus dem Bereich heraus, um ein Stehenbleiben zu verhindern)
Blade: Deaktiviert oder aktiviert den Schnittmotor.
Wire turn: Es kann eingestellt werden, ob der Roboter die Fahrtrichtung (im 45° Winkel) ändern soll, falls er parallel zum Begrenzungsdraht fährt (aktiviert).
Blade high RPM: Bei Aktivierung: Der Schnittmotor läuft in der Standardgeschwindigkeit und dreht bei höherem Rasen auf die höhere Geschwindigkeit. Deaktiviert: Schnittmotor läuft immer mit der Standarddrehzahl.
- Automatic: Der Schnittmotor wechselt automatisch zwischen den beiden Drehzahlwerten anhand der Stromaufnahme des Motors (Grasdichte).
- Always Low: Der Motor sreht immer mit der minimalen Drehzahl, selbst bei hoher Belastung
- Always High [nur bei L400i ]: Der Schnittmotor dreht immer mit der höchsten Drehzahl, selbst wenn keine Belastung erkannt wird. ACHTUNG: dadurch kann sich die maximale Arbeitszeit verringern.
Rapid returns: Deaktiviert oder aktiviert die schnelle Rückkehr zur Ladestation. (Dreieck)
Block: Aktiviert oder deaktiviert die Funktion, wenn der Roboter mit "blocked" stehen bleibt, weil er länger als 15 Minuten weder Begrenzungskabel noch ein Hindernisse erkannt hat. Dine Deaktivierung ist nur sinnvoll, wenn Sie den Roboter aufgebockt testen möchten.
Wire on Strait: Die Standardeinstellung ist deaktiviert. Ist die Funktion aktiviert, fährt der Roboter in einer Engstelle aus V-Meter automatisch zum Begrenzungskabel und folgt diesem (Follow wire) für die eingestellte "Max Follow Wire" Länge. Es könnte somit in bestimmten Fällen keine Beruhigungsschleife (Recall on wire) installiert werden. Gleichzeitig ist diese Funktion nützlich, wenn der Roboter eine Beruhigungsschleife (Recall on Wire) nicht richtig erkennt. Dies zeigt sich, wenn der Roboter über die Beruhigungsschleife fährt und danach dem Begrenzungskabel nur für ein paar Zentimeter folgt, anstatt der bei "Max Follow Wire" eingestellten Länge. Wir empfehlen Ihnen jedoch, trotzdem immer eine Beruhigsungsschleife zu installieren.
Loop Detect: Wenn diese Funktion deaktiviert ist, erkennt der Roboter bei seiner Ladungssuche kleine Inseln nicht und fährt am Kabel um die Insel, ohne sie zu verlassen. Diese Funktion ist nur für eine Fehlersuche relevant.
Amico: Deaktiviert: Der Roboter ignoriert Amico, und somit lässt er den Schnittmotor eingeschaltet.
Direction change: Einstellung, ob der Roboter nachdem Neigungs- (Tilt) oder Hebesensor (Lift) ausgelöst haben, die Fahrtrichtung ändern soll (aktiviert), oder nicht (deaktiviert).
- Aktiviert: Schnittmotor stoppt, Robotor fährt kurz zurück, dreht sich nach rechts oder links, bevor er neu startet, um vorwärts zu fahren.
- Deaktiviert: Roboter stoppt nur den Schnittmotor, fährt aber weiter in Vorwärtsrichtung.
Current Bump: Aktiviert oder Deaktiviert die Funktion des Smart Bumps
Retry Charge: drei verschiedene Einstellmöglichkeiten:
- Aktiviert: Der Roboter verlässt die Ladestation jedesmal, wenn er die Ladespannung verliert.
- nach Plan (on scedule): Der Roboter verlässt die Ladestation nur wenn er die Ladespannung verliert und er in seiner Arbeitszeit ist.
- Deaktiviert: Der Roboter verlässt seine Station nicht im Falle eines Spannungsverlustes.
Dock Forward [nur bei 4.0]: wenn diese Funktion aktiviert ist, wird der Roboter mit verringerter Geschwindigkeit vorwärts an die Ladestation anfahren und den Bumper auslösen. Danach fährt er rückwärts, bis er die Ladeplatte verlassen hat, dreht sich um 180° und dockt rückwärts an die Ladekontakte an. ACHTUNG: diese Funktion ist abhängig vom Airmarker.
GPS return: Aktiviert den erweiterten Algorithmus, der die GPS Position verwendet, damit der Roboter schneller zurück zur Ladestation fahren kann.
A - GPS RETURN: Aktiviert oder Deaktiviert die Funktion GPS Return.
B - TARGET POSITION: Wählen Sie die Methode zum Festlegen des GPS Punkts für die Ladestation:
Auto: Der Roboter setzt einen automatischen GPS Punkt
Set: Setzen eines manuell Punkts
C - POSITION: Status ob ein GPS Punkt gesetzt ist (settled) oder nicht (not settled)
Für weitere Informationen lesen Sie das Dokument GPS Return.
Obstacle map: Aktiviert: Bewegliche Hindernisse (zB: Gartenstuhl, Liege, ...), werden über die GPS Koordinaten (Smart Partition System) erkannt. Roboter fährt beim zweiten Mal langsamer an das Hindernis. Diese Speicherung verliert der Roboter, sobald er beim dritten Mal kein Hindernis mehr erkennt.
Smart coverage: Deaktiviert oder aktiviert den erweiterten Mähalgorithmus, der die GPS-Koordinaten verwendet, um die gesamte Mähfläche ausbalanciert zu mähen und um in alle Bereiche zu fahren.
GPS wire [nur bei L400i]: Aktiviert den erweiterten Algorithmus, der die GPS-Positionen verwendet, damit der Roboter zB in der Mitte eines Fußballfeldes bei sehr schwachem bzw. fehlendem Signal arbeiten kann:
A - GPS Wire : ON = aktiviert den erweiterten Algorithmus, der die GPS-Position und den virtuellen Gartenplan verwendet, um es dem Roboter zu ermöglichen, weiter zu mähen, selbst wenn er sein Signal (Begrenzungskabel) verliert.
Der Roboter stoppt nicht mit der Meldung "NO SIGNAL", in folgenden Fällen:
Er verliert das Signal vom Begrenzungskabel.
Dank der GPS-Positionsmessung erkennt der Roboter, das er weit genug entfernt vom Begrenzungskabel ist (mehr als 10 m) und in einem Bereich, in dem er gerade zuvor noch mit korrektem Signal (Begrenzungskabel) gearbeitet hat.
Zum besseren Verständnis, folgendes Beispiel:
Der Roboter mäht in einem neuen Bereich, und plötzlich verliert er, aufgrund einiger Interferenzen das Signal, befindet sich aber weit entfernt vom Begrenzungskabel. Normalerweise stoppt der Roboter in so einem Fall den Schnittmotor aus Sicherheitsgründen sofort, stellt das Signal wieder her und startet neu. Wenn die Funktion aktiviert ist, markiert der Roboter in diesem Fall die Position auf der Karte (auf der SD Karte gespeichert) als bekannte Position mit folgenden Merkmalen: Fern vom Begrenzungskabel, Kabelsignal vorhanden. Das nächste Mal, wenn der Roboter auf die gleiche Position kommt, kann er das Kabelsignal zwar für den Moment nicht messen, aber er stoppt nicht.
Wenn die Funktion deaktiviert ist, stoppt der Roboter wie gewohnt mit der Meldung "NO SIGNAL".
B - Border mapped: mit "YES" bestätigen Sie, dass der Roboter auf seiner virtuellen Karte das gesamte Begrenzungskabel gespeichert hat. Setzen Sie "Yes" erst nachdem Sie den Roboter direkt nach der Ladestation, dem Kabel vollständig entlang herum bis zurück in die Ladestation geschickt haben. Dabei sollen auch abgegrenzte Gefahrenbereiche, wie z. B: Schwimmbecken inkludiert werden.
Diese Funktion muss nur aktiviert werden, wenn das automatische Speichern der Karte mit "GPS wire" nicht ausreicht, um einen ordnungsgemäßen Mähbetrieb zu ermöglichen (zB bei einem sehr großen Mähbereich. Der Roboter braucht sehr lange, bis er diesen Bereich als Karte angelernt und abgespeichert hat).
ACHTUNG:
Diese Funktionen arbeiten dank GPS. Wenn der Roboter seine GPS-Position verliert, kann er auch stoppen, selbst wenn der virtuelle Gartenplan vorhanden ist. Starten Sie den Roboter nur innerhalb seines Begrenzungskabels, und überprüfen SIe das der Kanal am Sender und am Roboter ident sind.
Wenn Sie "BORDER MAPPED" auf YES setzen, dann arbeitet der Roboter ohne Kabelsignal, und könnte dann seinen Mähbereich verlassen, wenn tatsächlich kein Signal vorhanden ist.
Spiral threshold - Speed - Max Follow wire: Für diese Einstellungen können genaue Werte eingegeben werden, nicht nur aktiviert bzw. deaktiviert. Um die Werte einzugeben, zuerst wie in der Abbildung die Buttons A, B oder C drücken und dann mit den Pfeil runter und rauf Tasten einstellen.
A. Spiral threshold: Deaktiviert/aktiviert die Spiralfunktion, die der Roboter bei hohem Gras ausführt, Weiters kann man die Empfindlichkeit einstellen.
Standardeinstellung = "default". Folgendes ist möglich :
- Wenn Sie die Einstellung auf positive Werte von +1 bis +4 ändern, wird der Roboter häufiger und auch schon bei niedrigerem Gras den Spiralmodus starten.
- Wenn Sie die Einstellung auf negative Werte von -1 bis -4 ändern, wird der Roboter seltener und auch bei höherem Gras, als in der "default" Einstellung, den Spiralmodus starten.
Es kann erforderlich sein, die Empfindlichkeit der Spiralfunktion zu ändern, wie zum Beispiel:
- stärkeres oder dünneres Gras
- höhere Luftfeuchtigkeit am Rasen
- Schnitthöhe (bei sehr niedriger Schnitthöhe hat der Schnittmotor einen größeren Kraftaufwand und leitet dadurch öfter eine Spirale ein) Kundenwünsche (Schnittbild)
- Schnittmotor Verschleiß im Laufe der Zeit
B. Einstellungen der Fahrgeschwindigkeit, Standardeinstellung 30m/min. Allerdings lässt sich die Geschwindigkeit nicht ändern, die der Roboter in der Nähe und auch direkt am Begrenzungskabel fährt.
C. Max follow wire: Einstellung, wie viele Meter der Roboter nach einer Beruhigungsschleife, direkt am Draht fahren soll, wenn er z.B. im V-Meter zurück zur Ladestation fährt.
D. Docking direction: Einstellung, wie der Roboter die Ladestation aufsuchen soll (im Uhrzeigersinn oder dagegen). Ist keine Auswahl getroffen sucht der roboter standardmäßig die Ladestation auf (im Uhrzeigersinn).
Bei neueren Softwareupdates wurden zusätzliche Einträge hinzugefügt, die nicht immer für alle Produkte vorhanden sind:
- Bounce on wire [nur 9015DE0]: Wenn diese Option deaktiviert ist, bewegt sich der Roboter beim Berühren des Kabels wie folgt:
- Rückwärtsbewegung
- drehen, um die Richtung an Ort und Stelle zu ändern
- vorwärts fahren
- Blade offset [nur L400i-Plattform mit elektrischer Schnitthöheneinstellung]: Wenn deaktiviert, ist der Unterschied der Schnitthöhe zwischen dem mittleren und dem seitlichen Schnittmotor nicht vorhanden
5. Service Mode
Im Servicemodus werden wichtge Parameter (Werte, Daten) auf dem Display angezeigt, während der Roboter in seinem normalen Mähbetrieb arbeitet.
Der Service Mode wird in einem separaten Beitrag behandelt werden.
6. GPS zurücksetzen
Wählen Sie diese Funktion, um die GPS-Karte als auch die Karte mit den gespeicherten Hindernissen zurückzusetzen.
Die Rücksetzung ist dann notwendig, wenn der Roboter in einen anderen Garten installiert wird, oder Sie wesentliche Änderungen an der vorhandenen Installation durchgeführt haben.
ACHTUNG: Wenn Sie die GPS-Karte zurücksetzen, verliert der Roboter auch seinen Referenzpunkt für die GPS-Rückkehr!
7. Tilt zurücksetzen
Drücken SIe die Taste, um den Neigungssensor (TILT) zurückzusetzen, Bei einem Motherboardtausch ist dieser Schritt unbedingt durchzuführen. ACHTUNG: Das Zurücksetzen muss auf einer ebenen Fläche durchgeführt werden, und der Roboter geschlossen sein.
8. Sensoren testen
In diesem Menü können alle im Roboter installierten Sensoren gestestet. Welche Sensoren es gibt, hängt vom jeweiligen Robotermodell ab. Es können keine Einstellungen vorgenommen werden.

A - Das Symbol leuchtet auf, wenn die Stopptaste gedrückt wird oder die Stopptaste vom Motherboard abgesteckt ist.
B - Das Symbol leuchtet auf, wenn der Roboter das Airmaker Signal der Ladestation erkennt. Er misst das Signal nur in der Nähe der Ladestation (etwa 3 Meter).
C - Das Symbol leuchtet auf, wenn der Regensensor ausgelöst wird. Zum Testen, einfach die beiden Sensorsonden berühren (kurzschließen).
D - Das Symbol leuchtet auf, wenn der Bumper (Stoßsensor) ausgelöst wird, oder der Sensor vom Motherboard abgesteckt ist.
E - Das Symbol leuchtet auf, sobald der Roboter vorne hochgehoben wird und eines der beiden Vorderäder (Drop-Down-Räder) 1 cm herunterfällt, oder der Sensor (Safety Lift) vom Motherboard abgesteckt ist.
F - Hier werden die Messwerte von den Spulen angezeigt, die das Signal vom Begrenzungskabel messen:
"+" bedeutet, die Spule ist innerhalb des Begrenzungskabels.
"--" zeigt an das der Roboter die Signalstärke nicht messen kann.
Jede Reihe entspricht einem Spulenpaar. Die Anzahl der Paare ist vom Robotermodell abhängig.
Der Wert ist die Signalstärke und ist normalerweise keine nützliche Info für die Fehlersuche. Der Wert kann für den Hersteller nützlich sein, um festzustellen, ob der Roboter ein abnormales Verhalten zeigt.
ACHTUNG: Die Messwerte beziehen sich auf den in der Signaleinstellung, eingestellten Kanal am Roboter!
G - Hier wird der Wert des Neigungssensors angezeigt, bezugnehmend, auf den vorher auf einer ebenen Fläche genullten Sensor (Tilt Reset).
ACHTUNG: Der Neigungssensor ist im Motherboard integriert. Sollte das Motherboard nicht richtig programmiert worden sein, oder der Roboter war offen, während der Neigungssensor gemessen hat, ist der angezeigte Wert möglicherweise falsch. In diesem Fall muss der Neigungssensor wieder genullt werden, so wie im Menüpunkt "Tilt Reset" erklärt!
9. Motorentest
Dieses Untermenü ermöglicht es, die 2 Radmotoren und den Schnittmotor zu testen.
In diesem Untermenü können keine Einstellungen vorgenommen werden.
Verwenden Sie die seitlichen Pfeile um zwischen dem Schnittmotor-Bildschirm und dem Radmotor-Bildschirm zu wechseln.


A - Startet die Motoren. Die Radmotoren können in verschiedenen Leistungsstufen (Geschwindigkeiten) getestet werden, in Vorwärtsrichtung. B - Startet die Radmotoren in der Rückwärtsrichtung.
C - Stoppt die Radmotoren.
D - Synchron-Taste. Wenn diese leuchtet, werden beide Radmotoren zusammen gesteuert.
ACHTUNG: RPM, Current, T driver und T motor Werte werden nur als Referenz angezeigt. Diese müssen nicht mit den Nennwerten verglichen werden, um herauszufinden ob ein Motor einen Fehler hat.
Bei Fehlfunktion wird ein Fehler auf dem Bildschirm angezeigt!
10. Autocheck Test
In diesem Untermenü kann man den Autocheck (Test) starten, um eine vollständige Funktionsprüfung des Roboters durchzuführen.

Der Start-Bildschirm (im Autocheck.Test) zeigt das Datum, an dem der Autocheck das letzte mal erfolgreich durchgeführt wurde. Drücken SIe OK um den Autocheck zu starten.
Der Roboter muss sich auf einer ebenen Stelle, und innerhalb des Begrenzungskabels befinden. Er braucht ein TX-C1 Signal.

Die komplette durchführung des Autochecks wird hier nich beschrieben, weil der Roboter alle Schritte des Tests selbst am Bildschirm zeigt.
Information:
Die nachfolgend aufgeführten Fehlermeldungen sind nach den vorhandenen Komponenten sortiert.
Jede Fehlermeldung wird mit einer oder mehreren Ursache(n) aufgelistet und mit einer oder mehreren Lösungsmöglichkeit(en) ergänzt.
2. Sicherheitskomponenten
| Codes | Fehlermeldung | Beschreibung | Abhilfe |
| 6 | Bump Error (Stoßfehler) | Eines der (oder mehrere) Bumpsensoren wurde für länger als 10 Sekunden durchgehend ausgelöst. | 1. Überprüfen Sie, ob der Roboter nicht durch ein Hindernis blockiert wird. Wenn dies der Fall ist, ändern Sie die Installation gemäß den Anweisungen im Dokument "MD-CT-RO-50 Installation". 2. Öffnen Sie das Servicemenü - Test Sensors. Überprüfen Sie die ordnungsgemäße Aktivierung der Sensoren (siehe Dokument "AM4000-Servicemenü und erweiterte Einstellungen", Abschnitt 8). Wenn nicht alle Sensoren wieder auf die Ausgangswerte (nicht ausgelöst) gebracht werden, wiederholen Sie den Test erneut ohne Haube (falls vorhanden). 3. Überprüfen Sie die Bumpereinheiten auf mechanische Beschädigungen. Ist dies der Fall, dann ersetzen Sie entsprechende mechanische Teile. 4. Kontrollieren Sie die Bumpsensor-Platine, ist diese defekt, tauschen Sie sie. |
| 20 | Tilt (Neigungsfehler) | Der Tilt-Sensor misst eine Neigung die größer ist, als der maximal zulässige Wert, für eine Zeitspanne von länger als 10 Sekunden. | 1. Stellen Sie den Roboter auf eine ebene Fläche und setzen den Tilt-Wert zurück. (Servicemenü - Tilt Reset) 2. Kontrollieren Sie im Anschluss ob der Neigungssensor kalibriert bleibt in dem Sie nochmal im vorhin genannten Menü einsteigen. Sollte der Roboter nicht kalibriert sein, kontaktieren Sie bitte das Serviceteam. |
| 43 | Rollover (Zu große Neigung) | Die Neigung ist größer als 90°. | |
| 44 | Lift (Hebesensor Fehler) | Der Liftsensor/Die Liftsensoren sind länger als 10 Sekunden ununterbrochen aktiviert. | 1. Überprüfen Sie, ob der Roboter wirklich irgendwo angehoben / blockiert wird. In diesem Fall besteht die einzige Lösung darin, die Installation gemäß den Anweisungen im Dokument "MD-CT-RO-50 Installation" zu ändern. 2. Öffnen Sie das Servicemenü - Sensor testen. Überprüfen Sie die ordnungsgemäße Aktivierung der Sensoren (siehe Dokument "AM4000-Servicemenü und erweiterte Einstellungen", Abschnitt 8). Wenn die Hebesensoren nicht richtig reagieren, überprüfen Sie die mechanische Bewegung der Sensoren. 3. Wiederholen Sie den Test in Punkt 2 erneut. Sollten weiterhin Fehler auftreten, dann kontrollieren Sie Listsensor-Platinen auf einen Defekt, und tauschen Sie diese Falls notwendig. |
| 64 | STOP or no cover (STOP oder Keine Abdeckung) | Die Stop-Taste wird beim Start des Roboters nicht erkannt. | 1. Kontrollieren Sie ob die Stoptaste ordungsgemäß angeschlossen ist. 2. Rufen Sie das Servicemenü - other Settings auf. Überprüfen Sie die ordnungsgemäße Aktivierung des Sensors (siehe Dokument "AM400-Servicemenü und erweiterte Einstellungen", Abschnitt 8). Bei negativem Test prüfen Sie die mechanische Betätigung des Tasters und die interne Verbindung. |
| 171 | Radar error | Einer der Radarsensoren wurden vom Roboter nicht erkannt | 1. Prüfen sie ob alle Radarsensoren korrekt angesteckt sind, siehe Informationen über Mainboard Anschlüsse Quad 2. Führen sie ein Software-Update durch 3. Verbinden sie den Mäher mit der Service APP und prüfen sie die Funktion der Radarsensoren. Im Fall eines Fehlers muss der Sensor getauscht werden. Sollte dies keine Lösung bringen, tauschen sie das Mainboard |
3. Motoren
| Codes | Sub-Fehlercodes | Fehlermeldung | Beschreibung | Kontrolle |
| 8 | Gras zu hoch | Der Messermotor erreicht nicht die gewünschte Drehzahl. Der Roboter stoppt, nachdem die folgende Bedingung erfüllt ist. Der Roboter versucht 10 Minuten lang in verschiedenen Bereichen, den Messermotor zu starten. Wenn der Roboter innerhalb dieser Zeit den Messermotor nicht starten kann, stoppt er mit diesem Fehler. | 1. Reinigen Sie den Roboter und die Klinge. Gras, das sich unter dem Roboter oder auf dem Messer angesammelt hat, könnte die Kraft auf den Messermotor erhöhen. 2. Überprüfen Sie, dass der Roboter nicht mehr als 1 cm Gras schneidet, wie in der Bedienungsanleitung gefordert. Erhöhen Sie gegebenenfalls die Schnitthöhe. 3. Verwenden Sie bei hartem Gras ein Messer mit kleinem Durchmesser, um den Kraftaufwand zu verringern. 4. Überprüfen Sie, ob die Schnitthöheneinstellung richtig fixiert ist oder ob sich die Messermotorhalterung nicht frei bewegt, wenn der Exzenter geschlossen ist. Wenn nicht, überprüfen Sie den inneren Verschluss. 5. Trennen Sie den Messermotor von der Hauptplatine und prüfen Sie, ob sich der Messermotor von Hand frei dreht. Wenn nicht, tauschen Sie den Messermotor aus. 6. Lassen Sie den Testmotor im Servicemenü laufen und prüfen Sie, ob Fehler vorliegen (weitere Untersuchungen finden Sie in Abschnitt 3.1). | |
| 21 | Generisch | Klingenfehler | Der Messermotor ist blockiert [Modelle L400i - mittlerer Messermotor] | 1. Reinigen Sie den Roboter und die Klinge. Gras, das sich unter dem Roboter oder auf dem Messer angesammelt hat, könnte die Kraft auf den Messermotor erhöhen. 2. Überprüfen Sie, dass der Roboter nicht mehr als 1 cm Gras schneidet, wie in der Bedienungsanleitung gefordert. Erhöhen Sie gegebenenfalls die Schnitthöhe. 3. Trennen Sie den Messermotor von der Hauptplatine und prüfen Sie, ob sich der Messermotor von Hand frei drehen lässt. Wenn nicht, tauschen Sie den Messermotor aus. 4. Führen Sie den Testmotor im Servicemenü aus und prüfen Sie, ob ein Fehler vorliegt (weitere Untersuchungen finden Sie in Abschnitt 3.1). |
| 22 | TMOTOR | |||
| 23 | TDRV | |||
| 24 | AKTUELL | |||
| 25 | Drehzahl | |||
| 26 | WDOG | |||
| 27 | SCHEITERN | |||
| 104 | BLOCKIERT | |||
| 28 - 35 | Generisch | Fehler am linken - rechten Rad | Der linke oder rechte Radmotor ist blockiert (die erste Zahl bezieht sich auf den linken Motor) | 1. Überprüfen Sie, ob es externe Gegenstände oder Bedingungen gibt, die den Radmotor blockieren. Entfernen Sie, wenn sie vorhanden sind. 2. Trennen Sie den Radmotor von der Hauptplatine und prüfen Sie, ob er sich von Hand frei dreht. Wenn nicht, tauschen Sie den Radmotor aus . 3. Führen Sie den Testmotor im Servicemenü aus und prüfen Sie, ob Fehler vorliegen (weitere Untersuchungen finden Sie in Abschnitt 3.1). |
| 29 - 36 | TMOTOR | |||
| 30 - 37 | TDRV | |||
| 31 - 38 | AKTUELL | |||
| 32 - 39 | Drehzahl | |||
| 33 - 40 | WDOG | |||
| 34 - 41 | SCHEITERN | |||
| 105 - 106 | BLOCKIERT | |||
| 107 - 115 | Generisch | [Nur L400i-Plattform] Linker - Rechter Blade-Fehler | Der Messermotor ist blockiert | 1. Reinigen Sie den Roboter und die Klinge. Gras, das sich unter dem Roboter oder auf dem Messer angesammelt hat, könnte die Kraft auf den Messermotor erhöhen. 2. Überprüfen Sie, dass der Roboter nicht mehr als 1 cm Gras schneidet, wie in der Bedienungsanleitung gefordert. Erhöhen Sie gegebenenfalls die Schnitthöhe. 3. Trennen Sie den Messermotor von der Hauptplatine und prüfen Sie, ob sich der Messermotor von Hand frei drehen lässt. Wenn nicht, tauschen Sie den Messermotor aus. 4. Führen Sie den Testmotor im Servicemenü aus und prüfen Sie, ob ein Fehler vorliegt (weitere Untersuchungen finden Sie in Abschnitt 3.1). |
| 108 - 116 | TMOTOR | |||
| 109 - 117 | TDRV | |||
| 110 - 118 | AKTUELL | |||
| 111 - 119 | Drehzahl | |||
| 112 - 120 | WDOG | |||
| 113 - 121 | SCHEITERN | |||
| 114 - 122 | BLOCKIERT | |||
| 123 - 131 | Generisch | [Nur L95-Plattform] Radfehler vorne links – rechts | Der vordere linke oder rechte Radmotor ist blockiert (die erste Zahl bezieht sich auf den linken Motor) | 1. Überprüfen Sie, ob es externe Gegenstände oder Bedingungen gibt, die den Radmotor blockieren. Entfernen Sie, wenn sie vorhanden sind. 2. Trennen Sie den Radmotor von der Hauptplatine und prüfen Sie, ob er sich von Hand frei dreht. Wenn nicht, tauschen Sie den Radmotor aus . 3. Führen Sie den Testmotor im Servicemenü aus und prüfen Sie, ob Fehler vorliegen (weitere Untersuchungen finden Sie in Abschnitt 3.1). |
| 124 - 132 | TMOTOR | |||
| 125 - 133 | TDRV | |||
| 126 - 134 | AKTUELL | |||
| 127 - 135 | Drehzahl | |||
| 128 - 136 | WDOG | |||
| 129 - 137 | SCHEITERN | |||
| 130 - 138 | BLOCKIERT | |||
| 139 - 147 | Generisch | [Nur L95-Plattform] Lenkfehler vorne links - rechts | Der vordere linke oder rechte Lenkmotor ist blockiert (die erste Zahl bezieht sich auf den linken Motor) | 1. Überprüfen Sie, ob es externe Gegenstände oder Bedingungen gibt, die den Radmotor blockieren. Entfernen Sie, wenn sie vorhanden sind. 2. Schalten Sie den Roboter aus und prüfen Sie, ob er sich von Hand frei dreht. 3. Trennen Sie den Radmotor von der Hauptplatine und prüfen Sie, ob er sich von Hand frei dreht. Wenn nicht, tauschen Sie den Lenkmotor aus. 4. Lassen Sie den Testmotor im Servicemenü laufen und prüfen Sie, ob Fehler vorliegen (weitere Untersuchungen finden Sie in Abschnitt 3.1). |
| 140 - 148 | TMOTOR | |||
| 141 - 149 | TDRV | |||
| 142 - 150 | AKTUELL | |||
| 143 - 151 | Drehzahl | |||
| 144 - 152 | WDOG | |||
| 145 - 153 | SCHEITERN | |||
| 146 - 154 | BLOCKIERT | |||
| 155 - 163 | Generisch | [Nur L95-Plattform] Lenkfehler hinten links - rechts | Der hintere linke oder rechte Lenkmotor ist blockiert (die erste Zahl bezieht sich auf den linken Motor) | 1. Überprüfen Sie, ob es externe Gegenstände oder Bedingungen gibt, die den Radmotor blockieren. Entfernen Sie, wenn sie vorhanden sind. 2. Schalten Sie den Roboter aus und prüfen Sie, ob er sich von Hand frei dreht. 3. Trennen Sie den Radmotor von der Hauptplatine und prüfen Sie, ob er sich von Hand frei dreht. Wenn nicht, tauschen Sie den Lenkmotor aus. 4. Lassen Sie den Testmotor im Servicemenü laufen und prüfen Sie, ob Fehler vorliegen (weitere Untersuchungen finden Sie in Abschnitt 3.1). |
| 156 - 164 | TMOTOR | |||
| 157 - 165 | TDRV | |||
| 158 - 166 | AKTUELL | |||
| 159 - 167 | Drehzahl | |||
| 160 - 168 | WDOG | |||
| 161 - 169 | SCHEITERN | |||
| 162 - 170 | BLOCKIERT | |||
| 1042 - 1043 - 1044 | Lange Trennung | Die Kommunikation mit einem der Antriebsmotoren war lange Zeit unterbrochen 1042 – Mittlerer Messermotor 1043 – Linker Messermotor 1044 – Rechter Messermotor | 1. Überprüfen Sie die interne CANbus-Verbindung zwischen dem betroffenen Antriebsmotor und früheren Komponenten in der Kommunikationsleitung. Überprüfen Sie, ob die Stifte in den Anschlüssen richtig befestigt sind. 2. Reinigen Sie den Stecker im betroffenen Treiber und in den früheren Komponenten von einigen Resten der Beschichtung . 3. Lassen Sie den Testmotor laufen. Wenn das Problem weiterhin besteht, versuchen Sie, den Treiber und das Kabel auszutauschen. | |
| 1010 - 1031 -1032 | Klingenhöhe | Die elektrische Schnitthöhenverstellung ist blockiert: 1010 - Einzel- oder Mittelmessermotor 1031 - Linker Messermotor 1032 - Rechter Messermotor | 1. Setzen Sie die Schnitthöheneinstellung über das Benutzermenü des Roboters oder der App zurück. 2. Überprüfen Sie die Verbindung zwischen dem Messermotor und der Hauptplatine . 3. Testen Sie mit einem anderen Messermotor. Wenn das Problem weiterhin besteht, tauschen Sie die Hauptplatine aus. |
3.1. Fehlermeldungen im Motorenlauftest
| Fehleranzeige | Beschreibung | Abhilfe |
| TMOTOR | Hohe Temperatur des Schnittmotors | Schließen Sie einen anderen Motor an. Wenn das Problem weiterhin besteht, dann tauschen Sie das Motherboard und teilen Sie das Ergebnis dem Service-Team mit. ACHTUNG: beim L400i ist der Schnittmotor an einem Treiber angesteckt. Tauschen Sie die Treiberplatine aus um festzustellen ob es an dieser Komponente zusammenhängt. |
| TDRV | Hohe Temperatur am Treiber des Messermotors | Schließen Sie einen anderen Motor an. Wenn das Problem weiterhin besteht, dann tauschen Sie das Motherboard und teilen Sie das Ergebnis dem Service-Team mit. ACHTUNG: beim L400i ist der Schnittmotor an einem Treiber angesteckt. Tauschen Sie die Treiberplatine aus um festzustellen ob es an dieser Komponente zusammenhängt. |
| CURR | Hohe Stromaufnahme der Motoren. | Schließen Sie einen anderen Motor an. Wenn das Problem weiterhin besteht, dann tauschen Sie das Motherboard und teilen Sie das Ergebnis dem Service-Team mit. ACHTUNG: beim L400i ist der Schnittmotor an einem Treiber angesteckt. Tauschen Sie die Treiberplatine aus um festzustellen ob es an dieser Komponente zusammenhängt. |
| RPM | Der Motor blockiert | Schließen Sie einen anderen Motor an. Wenn das Problem weiterhin besteht, dann tauschen Sie das Motherboard und teilen Sie das Ergebnis dem Service-Team mit. ACHTUNG: beim L400i ist der Schnittmotor an einem Treiber angesteckt. Tauschen Sie die Treiberplatine aus um festzustellen ob es an dieser Komponente zusammenhängt. |
| WDOG | Kommunikationsprobleme am Motherboard | Laden Sie die LOG und TRA Dateien über die Service app und teilen Diese mit dem Service Team um sie zu analysieren (instruction here) ACHTUNG: beim L400i prüfen Sie zunächst die Anschlüsse vom Motherboard zum betroffenen motor, für jeden Anschluss prüfen Sie den korrekten Sitz der Pins. |
| FAIL | Kommunikationsproblem | Prüfen Sie die Verbindung zwischen Motherboard und Motor. ACHTUNG: beim L400i ist der Schnittmotor an einem Treiber angesteckt. Tauschen Sie die Treiberplatine aus um festzustellen ob es an dieser Komponente zusammenhängt. |
| BLOCKED | Der Rotor im Motor blockiert | Laden Sie die LOG und TRA Dateien über die Service app und teilen Diese mit dem Service Team um sie zu analysieren (instruction here) ACHTUNG: beim L400i ist der Schnittmotor an einem Treiber angesteckt. Tauschen Sie die Treiberplatine aus um festzustellen ob es an dieser Komponente zusammenhängt. |
4. Andere Fehlermeldungen
| Codes | Fehlermeldungen | Beschreibung | Abhilfe |
| 5 | Blocked (Blockiert) | Der Roboter ist für längere Zeit auf kein Hinderniss gestoßen oder hat für längere Zeit den Begrenzungsdraht nicht erreicht. | 1. Überprüfen Sie, ob der Roboter wirklich irgendwo innerhalb des Bereichs blockiert ist. Wenn dies der Fall ist, entfernen oder bearbeiten Sie den Bereich wie im Dokument "MD-CT-RO-50 Installation" beschrieben. 2. Kalibrieren Sie den Neigungssensor, indem Sie den Roboter auf eine ebene Fläche stellen. Steigen Sie anschließend nochmal im Servicemenü ein und überprüfen Sie, ob der zurückgestzte Wert erhalten bleibt. Wenn nicht, kontaktieren Sie das Service-Team. 3. Deaktivieren Sie die Gyroskop-Funktion und kontrollieren Sie die Fahrtrichtung des Roboters. Der Fehler kann manchmal auch durch eine Fehlfunktion des Gyroskopsensors entstehen. Wenn sich die Fahrtrichtung bessert (gerader wird), wenden Sie sich an das Service-Team. 4. Deaktivieren Sie die Spiralfunktion. Wenn der Fehler nicht mehr auftritt, wählen Sie einen kleineren Wert bei den Spiraleinstellungen oder erhöhen Sie die Schnitthöhe. |
| 9 | Out of border (Außerhalb des Umfangs) | Der Roboter registriert kein "innen/innerhalb" Signal während den folgenden Manövern: - normale Arbeit (Orientierung am Begrenzungskabel, Stoßerkennung, Hebeerkennung oder Fahrtrichtungsfehler) - Zurück in die Station (entweder dem Draht folgen oder V-Meter) | 1. Überprüfen Sie, ob die Verbindung des Begrenzungskabels in der Dockingstation ordnungsgemäß hergestellt wurde (überprüfen Sie dies im Service-Menü - Signaltest). 2. Überprüfen Sie, ob der Begrenzungsdraht ordnungsgemäß an einem Hang verlegt wurde. Weitere Informationen finden Sie im Dokument "MD-CT-RO-50 Installation". 3. Überprüfen Sie ob das Begrenzungsdraht ordnungsgemäß um ein Hindernis gelegt wurde. "MD-CT-RO-50 Installation". 4. Überprüfen Sie ob eine benachbarte Installation auf den selben Kanal läuft. Wenn ja, wählen Sie ein anderes Kanal. 5. Bei Störungen durch magnetische Gegenstände (Zäune oder Beton) oder andere Kabel unter der Erde in der Nähe des Begrenzungskabels die Position des Kabels ändern oder eine Begrenzung um die Störungsquelle herum verlegen. |
| No signal (Kein Signal) | Der Roboter erkennt kein Signal. | 1. Überprüfen Sie, ob der Sender wie gewünscht blinkt. Wenn nicht, versuchen Sie herauszufinden warum der Sender nicht richtig blinkt. 2. Stellen Sie sicher, dass Sender und Roboter auf dem selben Kanal arbeiten. 3. Testen Sie einen anderen Roboter auf der selben Fläche, wenn der zweite Roboter die gleichen Fehler aufweist dann wird das Problem an der Installation liegen. | |
| 51 | Low battery (Niedriger Akkustand) | Roboter hat es nicht zurück in die Ladestation geschaft und ist gestoppt weil der Akkustand zu gering ist. | 1. Überprüfen Sie, ob der Roboter von allen Punkten der Fläche die Ladestation immer erreichen kann. Wenn nicht, dann bearbeiten Sie die Installation gemäß der Anleitung im Dokument "MD-CT-RO-50 Installation" 2. Überprüfen Sie die Batterieleistung, indem Sie den Roboter Report auswerten oder die Restkapazität der Batterie im Client testen. |
| 82 | Date Error (Datum Fehler) | Datum und Uhrzeit sind nicht gesetzt. | Stellen Sie bitte mittels Remote App Datum und Uhrzeit ein. (Wenn eine Verbindung mit Roboter via Remote App hergestellt wird, dann wird Datum und Uhrzeit autmatisch eingestellt.) |
| 1000 | SD card error (SD-Karten Fehler) | Der Mikroprozessor am Motherboard kann die SD-Karte nicht lesen. | 1. Klemmen Sie denn Akku vom Motherboard ab, entfernen Sie die SD-Karte und setzen Sie diese wieder ein. 2. Falls der Fehler weiterhin besteht, dann kontaktieren Sie das Service-Team. |
| 1012 | Geofence (Diebstahlschutz) | Der Roboter ist von der virtuellen GPS-Fläche entfernt worden. | 1. Schalten Sie den Roboter ab indem Sie den Pin eingeben und starten ihn wieder. 2. Vergrößern Sie den Radius des GPS-Bereichs, da die Position des Roboters Umgebungsbedingt nur mit einer zu großen Abweichung ermittelt werden kann. |
| 1015 | Overcurrent error (Überstromfehler) | Der vom Roboter während der Aufladephase gemessene Strom ist höher als der zulässige Schwellenwert: | 1. Überprüfen Sie, ob der Roboter mit der richtigen Stromversorgung ausgestattet ist, siehe Bedienungsanleitung. 2. Überprüfen Sie, ob die Stromversorgung die richtige Spannung liefert. Weitere Informationen finden Sie im Dokument "MD-CT-RO-50 Installation". 3. Wenden Sie sich an das Service-Team. |
| 1016 | Overvoltage error (Überspannungsfehler) | Die vom Roboter während der Aufladephase gemessene Spannung ist höher als der zulässige Schwellenwert. | |
| 1022 1023 1024 | Inductive module error (Induktiv Lademodul Fehler) | Nur beim 4.0er Modell: Induktiv Lademodul wurde nicht erkannt/gefunden. | 1. Induktiv Lademodul wurde entfernt. (In diesem Fall quittieren Sie den Fehler indem Sie den Home-Button betätigen) 2. Überprüfen Sie die Kontakte am Modul und die Kontakte der inneren Verkabelung des Moduls. 3. Überprüfen Sie die CAN-Bus Verbindung zwischen Motherboard und Lademodul. 4. Lademodul ist defekt. -> Tauschen |
| 1025 | Connect module error (Conectmodul Fehler) | Connectmodul wurde während des Startvorgangs nicht erkannt, aber war aktiv vor dem letzten Abschalten. | 1. Connectmodul wurde entfernt. (In diesem Fall quittieren Sie den Fehler indem Sie den Home-Button betätigen) 2. Überprüfen Sie bitte die Verkabelungen zwischen Motherboard und Connectmodul. 3. Überprüfen Sie bitte ob beide Abschlusswiderstände angesteckt sind. (Motherboard und Connectmodul) 4. Connectmodul ist defekt. -> Tauschen |
| 1030 | Low battery in recharging station (Niedriger Akkustand in der Ladestation) | Roboter konnte nicht geladen werden und ist deshalb vollkommen entladen. | 1. Schutzmodus des Akkus wurde aufgrund hoher Temperaturen aktiviert. (L15 und 4.0) 2. Bitte kontrollieren Sie die Spannung an den Ladekontakten der Station. |
| 1033 | Device error "Device - Rxxxxx Require - Ryyyyy" (Modul Fehler "Device - Rxxxxx Require - Ryyyyy") | Das entsprechende Modul muss aktualisiert werden. (Device - Rxxxxx -> Derzeitig vorhandenes Softwarepaket Require - Ryyyyy -> Benötigtes Softwarepaket) | Aktualisieren Sie bitte den Roboter. |
| 1045 | Battery not detected (Batterie nicht gefunden) | Die mit Bluetooth Modul ausgerüstete Batterie wurde nicht gefunden | |
| 1046 | Zdefender error (Zdefender Fehler) | Der Roboter kann den Zdefender nicht finden | 1. Zdefender wurde entfernt vom Roboter, in diesem Fall einfach die Meldung mit der "Home" Taste bestätigen 2. Prüfen sie die Kabelverbindung zwischen dem Zdefender und dem Mainboard 3. Prüfen sie ob die CANbus Entkabeln sowohl am Mainboard als auch Zdefender angesteckt sind 4. Fehlerfhafte Zdefendereinheit -> tauschen |
| 1049 | Docking error (Andockfehler) | Der Roboter hatte in 30 Minuten 10 Fehlerhafte Andockversuche | 1. Prüfen sie die Installation ob der Roboter sauber on die Station einfahren kann. 2. Prüfen sie die Lage das Kabels in der Ladestation un koorigieren sie diese evtl. nach wenn der Roboter versetzt am Kabel fahren sollte usw. 3. Prüfen sie die Ladekontakte in der Ladestation und im Roboter auf Funktion und richtigen Sitz/Kontakt 4. Prüfen sie die Spannung an den Ladekontakten, es könnte einen Spannungseinbruch geben, im zuge dessen können sie auch gleich das Ladekabel in der Station prüfen 5. Prüfen sie die Ladeverkabelung im Mähroboter 6. Prüfen sie den Akku |
| 5000 | Unexpected shutdown error (Unerwartetes Herunterfahren - Fehler) | Herunterfahren während der Startphase. | 1. Aktualisieren Sie den Roboter 2. Überprüfen Sie bitte Akku- und Ladeverkabelungen 3. Überprüfen Sie den Akku. 4. Kontaktieren Sie das Serviceteam. |
| 5001 | Herunterfahren nach dem Lesen des Fehlers. | ||
| 5002 | Herunterfahren während des Autochecks. | ||
| 5003 | Herunterfahren während des Ladevorgangs. | ||
| 5004 | Herunterfahren im Pausen Status | ||
| 5005 | Herunterfahren in der Arbeitszeit. | ||
| 5006 | Herunterfahren am Ende des Geschlossenen-Berreichszyklus. | ||
| 5008 | Herunterfahren im Stand-by Status (only charge) |
5. Tech L6 und S6 Fehlermeldungen
| odes | Error Message | Description | Control |
| 4000 | TRAPPED - No Grass (Gefangen - Kein Gras) | Der Roboter fährt nicht da in der entsprechenden Fläche kein Rasen vorhanden ist. (Grassensoren nehmen keinen Rasen wahr) | 1. Starten Sie den Roboter an einer anderen Position der Fläche. 2. Stellen Sie die Grassensorensensibilität um. (Stellen Sie den Roboter sensibler. Diese Einstellung kann in der Remote App vorgenommen werden) 3. Wenn der Roboter auch nicht mit umgestellter Grassensorensensibilitär nicht fährt obwohl Gras vorhanden ist, verbinden Sie sich mit dem Roboter mittels Service App. Wählen Sie Tools, Test Gerät, Sensoren Test und testen die einzelnen Grassensoren. Es sind 6 Grassensoren verbaut. 4. Ersetzen Sie den defekten Grassensor. 5. Ziehen Sie bitte einen Report und kontaktieren Sie das Serviceteam. |
| 4001 | TRAPPED - Drop-off (Gefangen - Abgrundsensor) | Der Roboter fährt nicht da auf beiden Seiten (vorne und hinten) die Liftsensoren ausgelöst sind. | 1. Überprüfen Sie bitte ob die Sensoren Umgebungsbedingt ausgelöst werden. 2. Überprüfen Sie die Funktionalität der Liftsensoren. Verbinden Sie sich mit dem Roboter mittels Service App. Wählen Sie Tools, Test Gerät, Sensoren Test und testen die einzelnen Liftsensoren. 3. Überprüfen Sie die Verkabelungen zwischen Liftsensoren und Motherboard und die Steckverbindungen. 4. Ersetzen Sie den defekten Sensor. 5. Ziehen Sie bitte einen Report und kontaktieren Sie das Serviceteam. |
| 4002 | TRAPPED - Bump (Gefangen - Stoßsensor) | Der Roboter fährt nicht da auf beiden Seiten die Bumpsensoren ausgelöst sind. | 1. Überprüfen Sie bitte ob die Sensoren Umgebungsbedingt ausgelöst werden. 2. Überprüfen Sie die Funktionalität der Bumpsoren. Verbinden Sie sich mit dem Roboter mittels Service App. Wählen Sie Tools, Test Gerät, Sensoren Test und testen die einzelnen Bumpsoren. 3. Überprüfen Sie die Verkabelungen zwischen Bumpsoren und Motherboard und die Steckverbindungen. 4. Ersetzen Sie den defekten Sensor. 5. Ziehen Sie bitte einen Report und kontaktieren Sie das Serviceteam. |
| 4003 | TRAPPED - Tilt (Gefangen - Neigungssensor) | Der Roboter fährt nicht da eine hohe Neigung gemessen wird. | 1. Überprüfen Sie den Arbeitsbereichen und gehen Sie sicher, dass die Umgebung den Spezifikationen des Roboters entspricht. 2. Kalibrieren Sie den Tiltsensor. Verbinden Sie sich mit dem Roboter mittels Service App. Wählen Sie Tools, Test Gerät, Tilt und setzen Sie den Tilt auf Null. 3. Ziehen Sie bitte einen Report und kontaktieren Sie das Serviceteam. |
1. Wann muss ein Transmitter Update durchgeführt werden?
Roboter bei denen nach einem Software Update das Airmarker Signal nicht mehr erkannt wird.
Alle vor Oktober 2022 hergestellten Roboter, bei denen Sie das Motherboard ersetzen müssen/mussten
2. Robotersoftware Updaten
Es ist empfohlen, dass vor dem Transmitter Update der Roboter auf die aktuelle, offizielle Software Version aktualisiert wird. Beachten Sie dazu auch die wichtigen Hinweise für Roboter Updates!
Das Update kann über die Tech Remote App oder die Ambrogio Service App erfolgen.
ACHTUNG!
Nach dem obigen Vorgang auf iOS ist es notwendig, das Gerät in den allgemeinen Bluetooth-Einstellungen des Smartphones zu entfernen, wo alle Bluetooth-Geräte aufgelistet sind, die mit dem Smartphone gekoppelt sind
Die Android-App fordert Sie auf, den Kopplungsvorgang erneut durchzuführen, wenn Sie ein neues Gerät verbinden
3. Vorgehen zum Update des Transmitters
3.1. Service-App Schritt-für-Schritt-Verfahren
ACHTUNG: Diese Funktion ist ab der Version R59539 von Android und R59599 von iOS verfügbar
1. Platzieren Sie den Roboter in der Dockingstation
2. Vergewissern Sie sich, dass sich der Roboter im MANUAL- oder PAUSE-Modus befindet
3. Koppeln Sie den Roboter mit der App
4. Rufen Sie das Menü "Werkzeuge - Update" auf
5. Wählen Sie "Sender-Update" oder "Transmitter Update"
1. TIPP: Positionieren Sie sich so, dass der Roboter zwischen Ihnen und dem Turm der Ladestation steht.
6. Warten Sie, bis der Vorgang abgeschlossen ist
3.2. TECH Remote App Schritt-für-Schritt-Verfahren
ACHTUNG: Diese Funktion ist ab Version R59540 von Android und R59566 von iOS verfügbar
1. Platzieren Sie den Roboter in der Dockingstation
2. Vergewissern Sie sich, dass sich der Roboter im MANUAL- oder PAUSE-Modus befindet
3. Verbinden Sie den Roboter mit der App
4. Gehen Sie in das Menü "Setup" -> "Allgemeine Einstellungen" und wählen Sie "Transmitter Update" oder "Sender Update".
5. Führen Sie das Update gemäß den Anweisungen durch.
6. Warten Sie, bis der Vorgang abgeschlossen ist.
7. Es kann notwendig sein mehrere Anläufe für das Update zu versuchen.
Diverses
Im Anhang zu diesem Beitrag können Sie sich eine alternative Vorlage für einen Service Begleitschein für Mähroboter Kundendienst herunterladen, wie wir sie bei uns verwenden.
Dies ist eine Alternative zum Roboter Report, den Sie in den Service Clients und Apps erstellen können. Die Vorlage ist auf Nutzung mit Microsoft Excel ausgelegt. Alternativ erhalten Sie eine PDF, die jedoch nicht digital ausgefüllt werden kann sondern nur als Druckvorlage dient.
Mähroboter Reparatur Begleitschein.xlsx - Tabellenblatt1.pdf
Mähroboter Reparatur Begleitschein.pdf
Alle Tech Line Mähroboter können mit originalem Zubehör von Zucchetti extern, auch ohne Ladestation aufgeladen werden. Für Händler und Servicepartner kann dies besonders im Service nützlich sein, da nicht die unterschiedlichen Ladestationen vorgehalten oder sogar beim Kunden abgebaut werden müssen.
Zum externen aufladen aller Tech Line Mähroboter benötigt man ein passendes Netzteil und ein passendes Adapter Kabel.
Es gibt folgende Netzteile die jeweils für verschiedene Modelle eingesetzt werden können:
Netzteil 29,4 V - 2 A Art. Nr. ELG-150-30ZCTE
Netzteil 29,4 V - 5 A Art. Nr. ELG-150-30
Netzteil 29,4 V - 8 A Art. Nr. ELG-240-30ZCTE
Netzteil 29,4 V - 10 A Art. Nr. ELG-300-30ZCTE
Netzteil 29,4 V - 12 A Nr. AMBELPB360-P
Dazu gibt es folgende Kabel zum externen Laden (Empfehlung zur Kombination siehe unter Kabeln).
Externes Ladekabel CB01_RICEX mit Stecker für Geräte mit eigener Buchse zum externen Laden:

Externes Ladekabel mit Krokodilklemmen CB01RICINV3

Externes Kabel 50_E0011_00 mit Kabelschuhen für Zylinder oder Kugel Ladekontakte:

50_E0011_00 ist älteres Kabel. Wenn Sie dieses Kabel bereits besitzen, können Sie es für folgende Mähroboter Modelle einsetzen:
Tech L20, Pro Tech 25 Serie, Pro Tech 35 Serie und Pro Tech 40 Serie.
Nachfolgend die Kombinationen von Netzteilen und Adapter Kabeln die ich zur Ladung der einzelnen Geräte Typen empfehle.
Tech Line L6 und S6 + Tech Line DZ2, BZ3 und DZ3
In diesem Beitrag stelle ich euch den Zugang zu den zwei Google Drive Ordnern zur Verfügung welche die jeweiligen Schulungsinhalte unserer Händler Schulungen 2024 enthalten.
Die Tech Line Händler Schulung für Einsteiger 2024
Enthaltenes Material:
- 0 Ziel und Programm
- 01 Neuheiten und Programm 2024
- 01.2 RTK und ZR EVO Demo im Garten
- 02 TECH Richtiges Modell wählen
- 02.1 TECH Roboter in Betrieb nehmen
- 03 Remote App Live Demo
- 03.1 Fleet Manager ZCS Robot Park
- 03.4 Rumsauer Helpdesk
- 05 Vorgehen zur Fehlerdiagnose
Die Tech Line Händler Schulung für Fortgeschrittene 2024
Enthaltenes Material:
- 0 Ziel und Programm
- 0.1 Vorstellungsrunde & Schwerpunkte
- 01 Technische Änderungen 2024
- 02 Neuheiten und Programm 2024
- 02.0 Gartner Hype Cycle
- 02.1 Remote App Live Demo
- 2.2 RTK Upgrade Kit verbauen inkl. S.W. Update
- 02.3 RTK Demo inkl. Karte erstellen
- 03 Fleet Manager ZCS Robot Park
- 03.1 Worte zu Service App und PC Client
- 03.2 ZR EVO Kit verbauen
- 03.3 4WD Winter Service inkl. Kit
- 03.4 Rumsauer Helpdesk
- 04 TECH Installation Besonderheiten
- 05 Vorgehen zur Fehlerdiagnose
- Akkus Draht und Verlegemaschine Aktion
- Kopie von 03.8 Mindset für maximalen Erfolg beim Verkauf
- Kopie von 2024 - Advance Training Tech-Ambrogio.pptx
- ZZZ 2024 - Advance Training Tech
1. Inhalt
Anleitung eines Verfahrens zum Ersetzen von Lagern in den Motoren, welches insbesondere für Motoren außerhalb der Garantie nützlich sein kann.
2. Notwendige Werkzeuge
2.1. Wenn eine Hydraulische Presse genutzt wird
| Beschreibung | Bild | |
| 1 | Hydraulikpresse |  |
| 2 | 1 – O-Ring-Zange 2 – Schraubendreher 3 – Verschiedenes Zubehör |
|

2.2. Wenn ein Schraubstock verwendet wird
| Beschreibung | Bild | |
| 1 | Schraubstock |  |
| 2 | 1 - O-Ring-Zange 2 - Hämmer 3 - Schraubendreher 4 - Splinttreiber d=5 mm |   |
3. Videoanleitung zum Tausch
| Plattform | Motorcode | Motorentyp | Motoretikett | Empfohlenes Lager (Marke – Teilenummer) | Video |
| L15 - L20 | C02264 | Klinge |  | SKF - W 6002-2Z SKF - W 6002-2RS1 | Verwendung einer hydraulischen Presse mit Schraubstock |
| L25 – 4.0 Basic – 4.0 Basic 4WD | C02362 | Klinge |  | SKF - W 6002-2Z SKF - W 6002-2RS1 | Verwendung einer hydraulischen Presse mit Schraubstock |
Seit Anfang 2022 wird (auch von Zucchetti selbst) der Frühere Akku Test über ein L60 Mainboard mit Entladevorrichtung nicht mehr verwendet. Dieser Test gibt Stand heute keine verlässlichen Ergebnisse mehr aus.
In diesem Artikel beschreiben wir euch zwei externe Geräte mit denen Ihr alle Tech Line (Zucchetti) Akkus testen könnt und wie es funktioniert.
Wir selbst nutzen den:
Zucchetti selbst nutz sozusagen eine etwas edlere Version dieses Testgeräts.
Nach unserer Erfahrung hat der West Mountain folgende Unterschiede zum Sky RC:
Das Gerät kann etwas größere Akkus testen (siehe BDA).
Die Software kann detaillierter eingestellt werden. Beispielsweise kann die Zahl der Zellen im Akku nahezu beliebig eingestellt werden. Dadurch kann die Software den Zustand des Akkus automatisch in % ausgeben, was man beim Sky RC Ergebnis selbst berechnen muss. Der Test Report kann als PDF gespeichert werden, wogegen man beim Sky RC am besten einen Screenshot (siehe unten) vom Ergebnis macht.
Da wir in den Ergebnissen und der Genauigkeit des Tests bisher keine Unterschiede feststellen konnten, werden wir bis auf Weiteres beim Sky RC Tester bleiben und euch auf dem Laufenden halten.
Nachfolgend die Anleitung zur Verwendung des Sky RC BDA 250 für TECH Line Akkus.
- Als erstes müsst ihr euch einen Adapter bauen, mit dem ihr vorzugsweise alle Akkus an das Testgerät anschließen könnt, da dieses lediglich mit einem Stecker geliefert wird der am Ausgang einfach eine + / - Litze ist.
- Als Basis könnt ihr das CB03_ADTPS Kabel von Zucchetti nehmen:

- Dann müsst ihr die Software wie oben angegeben von der Sky RC Homepage herunterladen (nur Windows) und installieren.
- Vor dem Test muss der zu testende Akku VOLL aufgeladen werden. Entweder direkt im zugehörigen Mäher, oder mit einem passenden Netzteil und der Hilfe eines weiteren Adapters. Als Hilfe kann auch hier das CB03_ADTPS für die Akkus mit HR5 Stecker und +/- Anschlüssen dienen. Für die modernen Akkus aus Power Units empfiehlt Zucchetti das ausgemusterte hintere Chassis eines Next Tech X4 Mähers zu verwenden. Alternativ könnt ihr euch selbst einen Adapter bauen. Beispiele:


Um den Test eines voll aufgeladenen Akkus durchzuführen, trefft ihr folgende Einstellung in der PC
Software:
Battery Type: LiIo
Mode: Constant Current
Battery Cells: 7
Discharge End V: 3,15 V/Cell
Discharge End Voltage: 22,0 V (regelt sich normal automatisch mit dem V/Cell)
Discharge Current: 3,50 A

Mit diesen Einstellungen klickt ihr dann auf Start. Ich empfehle euch, bei der Anzeige für das Ergebnis nur die Capacity (blauer Wert) des Tests einzublenden. Lediglich dieser Wert ist sinnvoll aussagekräftig. Zur Interpretation des Ergebnisses gilt dann immer:
- Der Akku erreicht > oder gleich 70 % seiner nominalen Kapazität als Ergebnis im Test = Test bestanden.
- Der Test endet mit einem Error = Test nicht bestanden.
- Der Akku erreicht < 70 % seiner nominalen Kapazität als Ergebnis im Test = Test nicht bestanden.

Beispiel 1 (Bild):
Test eines 7,5 Ah Akkus = 7500 mAh. Ergebnis 7354 mAh.
7354 / 7500 * 100 = 98,05 % = BESTANDEN.
Beispiel 2:
Test eines 7,5 Ah Akkus = 7500 mAh. Ergebnis 6821 mAh.
6821 / 7500 * 100 = 90,94 % = BESTANDEN.
Akku ist hier aber vermutlich schon in Gebrauch.
Beispiel 3:
Test eines 2,5 Ah Akkus = 2500 mAh. Ergebnis 1683 mAh.
1683 / 2500 * 1ßß = 67,32 % = FEHLER.
Diese Beispiel Rechnung gilt so auch für die Akkus aus den Power Units. Beispielsweise 10,35 Ah = 10350 mAh usw.
Feedback von Volker Scheerer vom 06.01.2023
Hallo hier noch ein Hinweis zu Eurem Beitrag hier.
Wir nutzen den Akkutester von SKY RC schon seit vielen Jahren und haben dazu folgende Anhaltspunkte für den Test.
Entladen wird nur bis auf 3V / Zelle. Bei 7S Akku = 21 V. Der Entladestrom wird immer mit 1C Eingestellt. Heißt ein 2,5 Ah Akku wird mit 2,5 A Stromstärke entladen, ein 7,5 Ah Akku mit 7,5A usw. Daraus ergibt sich eine Entladezeit von fast genau 1 Stunde, egal welcher Akku und die entnommene Kapazität entspricht auch in etwa der Kapazität Angabe des Akkus. Vorausgesetzt dieser ist in Ordnung!
Ein Akku ist defekt, wenn der Entladevorgang abgebrochen wird mit Error (Das BMS im Akku hat nach zu kurzer Zeit abgeschaltet) oder der Akku eine Kapazität (entladene mAh) von weniger als 70% hat. Heißt ein 2,5 Ah (2500mAh) Akku hat weniger als 1750 mAh entladen oder ein 7,5 Ah (7500 mAh) hat weniger als 5250 mAh usw.
Viele Grüße
Volker Scheerer
Nachfolgend beschreiben wir Ihnen den generellen Ablauf für einen Winterserivce bei TECH Line Mährobotern. Spezifische Schritte für einzelne Modellreihen werden in einzelnen Artikeln pro Modellreihe in der jeweiligen Sektion der Modellreihe veröffentlicht.
- Roboter wird vom Kunden zum Service abgegeben oder abgeholt.
- Roboter Bericht via TECH Remote App herunterladen.
- Erstellen Sie vor Beginn des Service einen Roboter Bericht über die TECH Line Remote App. Wählen Sie für den Bericht einen Zeitraum aus, zu dem der Roboter zuletzt noch normal im Einsatz beim Kunden auf der Fläche gewesen ist, bevor er Ihnen zum Service übergeben wurde. Idealerweise über zwei Einsatzwochen. ACHTUNG: es kann je nach Anzahl der Einträge mehrere Minuten dauern einen Bericht dieser länge zu erstellen, dies ist normal. Senden Sie sich den Bericht an Ihre eigene E-Mail Adresse und speichern ihn anschließend ab.
- Prüfen Sie den Bericht vor Start des Service auf unerklärliche Fehler oder besondere Vorkommnisse. Gegebenenfalls prüfen Sie Baugruppen mit Hinweisen auf Fehler in der folgenden Hardware Prüfung besonders gründlich.
- Trockenreinigung als Vorbereitung für den Service.
- Entfernen Sie das (oder die) Mähmesser vom Roboter. Prüfen Sie dabei das Messer auf Verschleiß, Schärfe und ggf. Unwucht. Tauschen Sie das Messer bei bedarf aus, indem Sie nach dem Service ein neues Messer montieren.
- Entfernen Sie die Antriebsräder des Roboters und reinigen Sie diese trocken aber gründlich.
- Reinigen Sie den Body des Roboters trocken aber gründlich von jeglichem Grasverschnitt.
- Öffnen Sie den Body des Roboters.
- Prüfen Sie dabei gründlich die Dichtung des Body.
- Tauschen Sie diese bei Bedarf aus!
- Bei Bedarf reinigen Sie das Innere des Roboters mit sanfter Druckluft oder einem Staubsauger mit niedriger Stufe.
- Führen Sie eine Sichtprüfung aller Kabelwege und Anschlüsse sowohl auf Seite des Mainboards als auch der Komponenten durch.
- Prüfen Sie alle Schrauben, insbesondere Verschraubung der Motoren auf festen und sicheren Sitz.
- Lockere Schrauben ziehen Sie nach, versehen Sie diese ggf. mit blauem Loctite 243 mittelfest.
- Schließen Sie den Roboter. Achtung nochmals auf Dichtung(en)!
- Software Update
- Meist erscheint seitens des Herstellers Zucchetti ein großes Software Update im jeweils ersten Quartal eines neuen Jahres. Diese Update können Sie durchführen. Am besten ca. 2 - 3 Wochen nach dem Erscheinen des Updates, damit auch jeweilige Hotfixes bereits eingespielt sind und das Update korrekt von den jeweiligen Android und iOS Versionen der TECH Remote App verarbeitet wurde.
- Nach dem Motto "do not beat a running System" ist es jedoch eine valide Überlegung auch ein Jahresupdate NICHT durchzuführen wenn der Mäher bisher ohne jegliche Probleme gelaufen ist.
- Während der Saison empfehlen wir grundsätzlich KEINE Software Updates vorzunehmen. Nur zur konkreten Behebung auftretender Probleme oder wenn die TECH Remote App ein Software Update unumgänglich verlangt. Bitte informieren Sie auch Ihre Kunden dahingehend.
- Funktionsprüfung bzw. Autocheck
- ENDE des 1. Quartal 2023 wird ZCS einen neuen Autocheck in die Service App einfügen, mit dem ein geführter Test aller elektronisch prüfbarer Komponenten in bestimmter Reihenfolge durchlaufen wird. Sobald der Autocheck verfügbar ist, wird er auch obligatorisch sein um im nächsten Schritt den Service für den Roboter zu registrieren und damit die Erweiterte Garantie zu sichern.
- Zur Durchführung des Autocheck wird eine Fläche mit mind. 3 x 3 Metern sowie einer befahrbaren und zum Roboter passenden Ladestation benötigt.
- Bis der Autocheck verfügbar ist, empfehlen wir den Einzeltest aller relevanten Komponenten:
- Insbesondere: Mähmotor(en), Antriebsmotoren, Drahtsensoren (Signal), Bump (Stoß) Sensoren, Tilt (Neigung) Sensor(en), Lift Sensor(en), Regensensor, Tasten insbesondere Notstopp-Taste.
- Sowie einen Probelauf von mindestens 30 Minuten.
- Akku Test
- Ab 800 Ladezyklen oder bei Verdacht auf abnehmende Leistung des Akkus empfehlen wir Ihnen den Akku im Zuge des Winterservice zu testen. Sehen Sie dazu den Artikel über das externe Batterie Testgerät.
Link zum Artikel Akku Tester
- Prüfen der Ladefunktion des Roboters
- Es gilt zu prüfen ob der Ladekreislauf des Roboters ordnungsgemäß Funktioniert und eine Ladespannung (29,3 V +/- 0,3) über die Ladekontakte hin zum Mainboard am Anschluss des Akkus angelegt wird.
- Gehen Sie am besten wie folgt vor:
- Stellen Sie den Roboter in die Ladestation.
- Bei Geräten mit Display können Sie die angelegte Spannung im Service Menü → Advanced Display unten anzeigen lassen.
- Bei Geräten ohne Display können Sie wahlweise die Spannung in der Service App (Tools) anzeigen lassen, oder eine Messung direkt am Anschlussstecker des Akkus am Mainboard durchführen.
- Service registrieren
- Registrieren Sie den durchgeführten Service in der Service App.
- Öffnen Sie die Service App auf Android oder iOS.
- Wählen Sie den Roboter aus der Garage aus.
- Auf der Hauptseite des Roboters finden Sie den Eintrag “Winter Service”.
- Wählen Sie den Button aus um den Eintrag zu bearbeiten.
- Wählen Sie das Datum, an dem der Service durchgeführt wurde.
- Ergänzen Sie ggf. notwendige Kommentare.
- Speichern Sie den Eintrag.
- Der Eintrag muss nun in der Service App als letzter Winter Service Eintrag + in der Remote App als Winter Service Eintrag zu sehen sein. Insbesondere für die Modelle X4 und X6 ist der korrekte Eintrag sehr wichtig, da dieser für die Anerkennung der Langzeitgarantie eine entscheidende Voraussetzung ist.
- ACHTUNG: Nach Erscheinen des Autocheck entspricht die vollständige, erfolgreiche Durchführung des Autocheck der Registrierung zum Service. Anders gesagt, die Durchführung des Autocheck ist der notwendige Schritt zur Registrierung des Service.
- WICHTIG: Mindestens 1 x alle 365 Tage MUSS ein Service für alle X4 und X6 Geräte registriert werden um die Garantie bis 6 Jahre zu erhalten.
- Registrieren Sie den durchgeführten Service in der Service App.
Eine Vorlage für Händler bzw. Dienstleister zur Übergabe von Mähroboter Installationen bzw. Inbetriebnahme könnt ihr euch unter folgendem Link herunterladen:
Bitte beachtet: Diese Vorlage dient nach unserer Ansicht als Schlüsselübergabe und "Gefahrenübergang" eines Mähroboters mit Installation und Inbetriebnahme oder nur rein einer Installation und Inbetriebnahme. Diese Vorlage stellt jedoch keine rechtliche Beratung dar und ist nicht anwaltlich geprüft.
In diesem Beitrag erklären wir Ihnen die Funktionsweise des Zucchetti Amico Systems zum Schutz von Haustieren und Kindern beim Einsatz eines Mähroboters.
1. Was sind die Anforderungen für Amico?
Um Amico verwenden zu können, muss der Roboter folgende Anforderungen erfüllen:
- Das Roboter Modell ist kompatibel mit dem Amico-Sender. Stand 2020 sind dies:
- Wiper Walker 35S und Walker 48S.
- Wiper Professional P-70S.
- TECH S6
- TECH Line D1 und DZ3
- Next TECH DX2, LX2 und SX2
- Next TECH DX2.5, LX2.5, DX2.9, LX2.9
- Pro TECH D25, L25i, S25i und L35i
- Next TECH BX4, LX4 und LX6 sowie Next Tech Q
- Der Roboter ist mit einer Software-Version höher ist als R42219 ausgestattet. Am einfachsten über die jeweilige App Ambrogio Remote oder My Roboter Wiper zu prüfen.
- Die Version der Ambrogio Remote App, die die Funktion "Amico" unterstützt, ist bei Android mindestens die Version R42497 und bei iOS mindestens R42498.
- Unterstützte iOS-Geräte: iPhone 5. Generation oder höher und iPad 4. Generation oder höher.
- Unterstützte Android-Geräte: Alle Geräte, die nach 2010 produziert wurden.
2. Wie funktioniert es?
"Amico" ist ein Gerät, bestehend aus einer Bluetooth-Platine und einer Knopfbatterie, das an einem durchschnittlich großen Armband oder Halsband angebracht werden kann.
Das Gerät schützt Kinder und Tier vor dem Roboter. Wenn der Roboter das Bluetooth-Signal von Amico erkennt, wird das Mähwerk des Roboters sofort ausgeschaltet. Die Entfernung, die der Roboter während des Abschaltvorganges zurücklegt, liegt zwischen 0,5m und einigen Metern.
Sobald das Signal vom Roboter nicht mehr erkannt wird, schaltet das Mähwerk wieder ein.
Der Roboter ändert dabei die Richtung NICHT, da der Roboter die Richtung, in der sich der Amico befindet, nicht feststellen kann. Die Wahrscheinlichkeit, dass der Roboter zB ein Haustier mit dem Amico NICHT trifft ist größer, wenn die Fahrtrichtung beibehalten wird. Außerdem würde eine Richtungsänderung bewirken, dass der Roboter die Rasenfläche nicht vollständig mähen kann, wenn sich ein Amico auf der Fläche befindet.
3. Wie wird Amico aktiviert?
Amico ist bereit, sobald der Kontaktunterbrecher der Batterie entfernt wird.
Es muss lediglich sichergestellt werden, dass die Software des Roboters gemäß den Anforderungen aktualisiert wurde. (siehe Anforderungen)
Nach der Aktivierung beträgt die Lebensdauer der Batterie etwa 1 Jahr.
4. Wie verbinde ich Amico mit der Remote App?
Wenn der Kontaktunterbrecher entfernt wurde, kann Amico mit der TECH Remote App über Bluetooth gefunden werden.
ACHTUNG: Die Aktivierung über die App ist nicht zwingend erforderlich. Es dient lediglich zur Überwachung, ob der Amico- Sender einwandfrei funktioniert und gibt Auskunft über den Batteriestatus.
In der nachfolgenden Beschreibung wird erklärt, wie Sie Amico in der App verbinden, am Beispiel eines Android Systems.
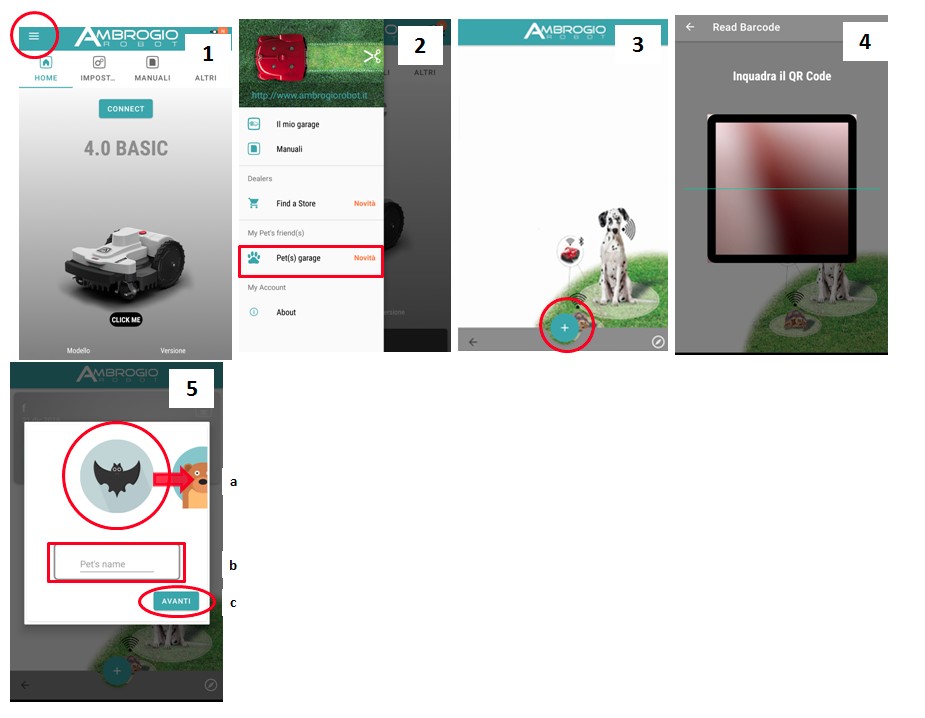
4.1. Android
| 1 | Sie können in jedem Abschnitt der App auf des Menü zugreifen. |
| 2 | Wählen Sie "Amico Garage" |
| 3 | Drücken Sie die "+" Taste |
| 4 | Scannen Sie den QR Code auf der Platine im Amico-Sender. |
| 5 |
|
| 6 | Die Anmeldung ist jetzt abgeschlossen. |
5. Wie überprüfe ich Amico?
Wir empfehlen, den Zustand der Batterie alle zwei Wochen zu kontrollieren, um die ordnungsgemäße Funktion zu gewährleisten. Dies gilt vor allem, wenn die Kapazität der Batterie um die Hälfte abgesunken ist (orangenes Batteriesymbol).
Wenn des Batteriesymbol rot ist, muss die Batterie getauscht werden.
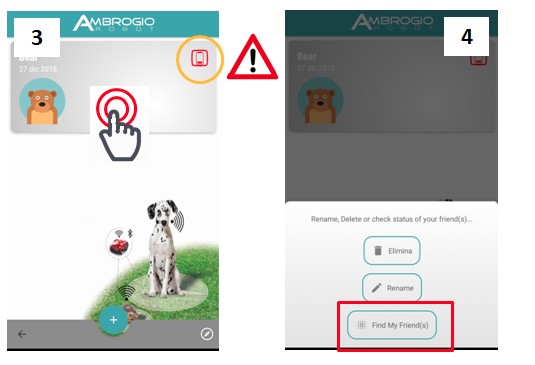
Der Status des Senders kann über die Garage kontrolliert werden, indem Sie ein Gerät auswählen und den Befehl "Find my friend" ausführen. (Folgende Schritte sind für die Plattformen Android und iOS gleich):
| 1 | Sie müssen Sich in der Nähe des Amico befinden, den Sie überprüfen möchten. |
| 2 | Öffnen Sie die Amico-Garage |
| 3 | Durch drücken des Haustierbildes öffnet sich eine Liste. |
| 4 | Wählen Sie "Find my Friend(s)" |
| 5 | Wenn die Suche abgeschlossen ist und der Sender arbeitet, erscheint auf dem Display das Symbol des Haustiers. Wenn Sie nun das Symbol wählen, können Sie den Batteriezustand prüfen. Wenn das Gerät nicht erkannt wird, funktioniert es nicht oder die Batterie ist leer. Wir empfehlen, die Batterie zu tauschen und den Vorgang nochmal zu starten. |
6. Wie lade ich Amico-Daten vom Roboter herunter?
Über den Roboter können Sie weitere Informationen von Amico auslesen:
- Wie oft der Roboter den Amico-Sender während des Betriebs erkannt hat.
- Falls der Roboter über ein ZCS Connect-Modul verfügt, die Position, an der der Amico- Sender erkannt wurde.
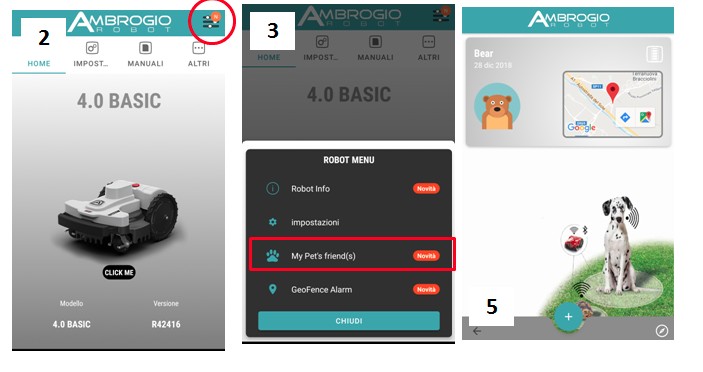
Nachfolgend wird erklärt, wie diese Daten vom Roboter heruntergeladen werden können (alle Schritte müssen in der Nähe des Roboters ausgeführt werden):
| 1 | Wählen Sie Ihren Roboter aus der Garage aus, indem Sie auf das Roboterbild drücken |
| 2 | Drücken Sie auf "Tools" |
| 3 | Wählen Sie "My Pet Friends" |
| 4 | Die App startet nun mit dem Download aller "Amico"- Daten, die vom Roboter erkannt wurden. ACHTUNG: Dieser Vorgang kann einige Minuten dauern. Bitte für die Dauer des Vorgangs in der Nähe des Roboters bleiben. |
| 5 | Am Ende des Vorgangs können Sie nun alle Informationen sehen, die vom Roboter erkannt und aufgezeichnet wurden. Falls das Gerät "Amico" nicht in der Garage vorhanden ist, wird in der Liste ein unbekannter Datensatz angezeigt. Ansonsten werden die Informationen in der "Amico"- Garage aktualisiert. |
7. Wie kann ich "Amico" deaktivieren?
Um das Gerät zu deaktivieren, müssen Sie die Batterie entfernen.
In Zukunft wird die Erkennung des Amico über das Servicemenü des Roboters deaktivierbar sein.
8. Können mehrere Amico-Geräte zusammen arbeiten?
Dank der Bluetooth-Kommunikation kommt es zu keinen Interferenzen zwischen einzelnen Geräten. Jeder Sender wird separat im Roboter erkannt, sodass sie zusammenarbeiten können.
ACHTUNG: Bei mehreren Amico-Sendern in einem Garten kann es sein, dass der Roboter lange ohne eingeschaltetem Messer läuft. Dies kann das Schnittbild des Rasens beeinträchtigen. In diesem Fall wird empfohlen, den Roboter zu Zeiten arbeiten zu lassen, wenn er auf keine Amico Sender treffen kann.
9. Wie kann ich die Batterie tauschen?
Um zur Batterie im Amico zu gelangen müssen Sie:
- Die Plastikkappe entfernen (A, Abbildung 4)
- Die Amico-Platine herausziehen (B, Abbildung 4)
- Die Batterie entfernen (C, Abbildung 4)
- Batterie ersetzen. Batterietyp: CR2032

10. Wie verwende ich Amico bei Schildkröten?
Falls der Amico-Sender an einer Schildkröte befestigt werden soll, wird ein spezielles Dichtmittel (Demotec90) benötigt.
Das Dichtmittel muss wie in Abbildung 5 gezeigt angebracht werden.

Abbildung 5: A - Geben Sie das Dichtmittel auf diesen Punkt.